Paso 6: El cerebro
![]()
![]()
![]()
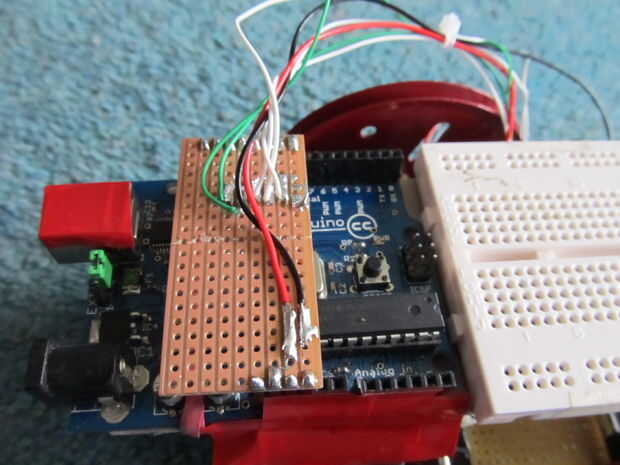
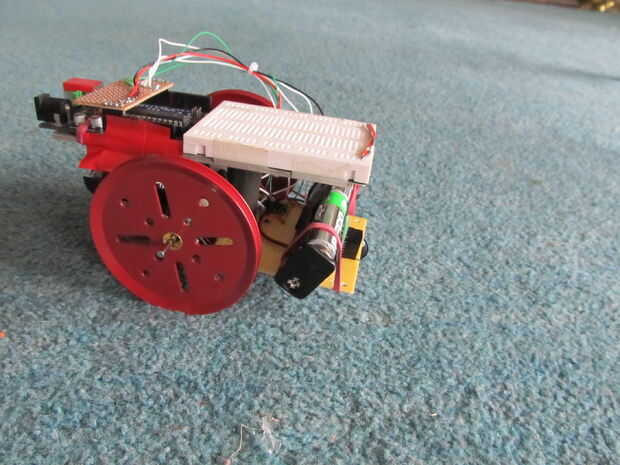
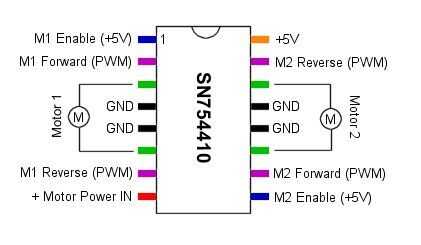
el robot es controlado por un freeduino, esto es un clon de arduino y utiliza el IDE de arduino, usted también puede usar un picaxe u otros mirocontroller, toma datos binarios y los que utiliza para controlar los motores a través del puente de h. Hice un escudo arduino básico marcando una línea a través de un pedazo de perfboard luego soldar cabeceras sobre ella, cubre pernos de 8 a 13 en la a y en realidad se utilizan los primeros cuatro pasadores en la parte inferior fila allthough sólo + 5 voltios y los tierra, el arduino es alimentado por baterías de AA th 4 que se sueldan sobre la placa perforada en la polaridad correcta. El puente H lleva 4 entradas para controlar los motores, utilicé pernos 10, 11,12 y 13, 10 y 11 tienen PWM por lo que significa que la velocidad puede ser controlada, así que usted puede controlar la velocidad que va hacia delante pero no detrás, he añadido notas para el esquema del puente H que muestra que los pernos se sueldan en donde.