Paso 2: Hacer la matriz de LED IR
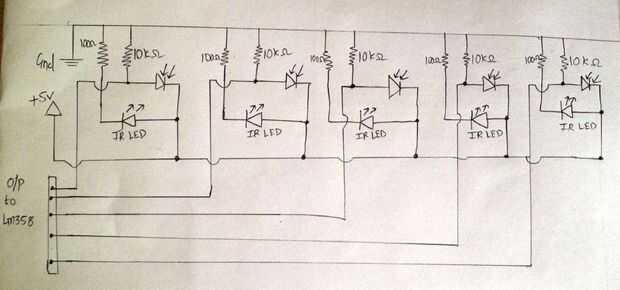
La placa de IR LED es bastante fácil. Echa un vistazo al diagrama de circuito para familiarizarse con las conexiones.
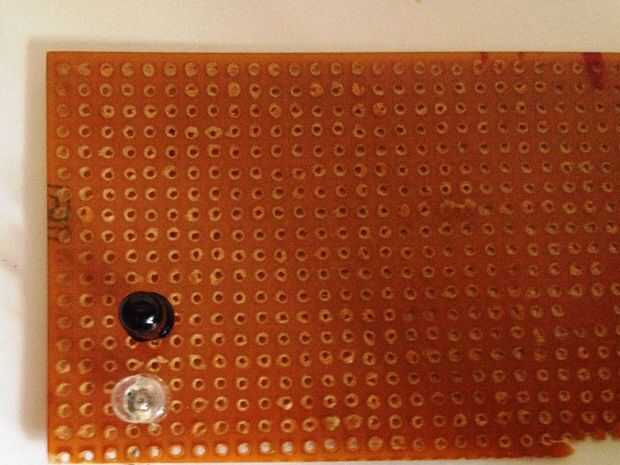
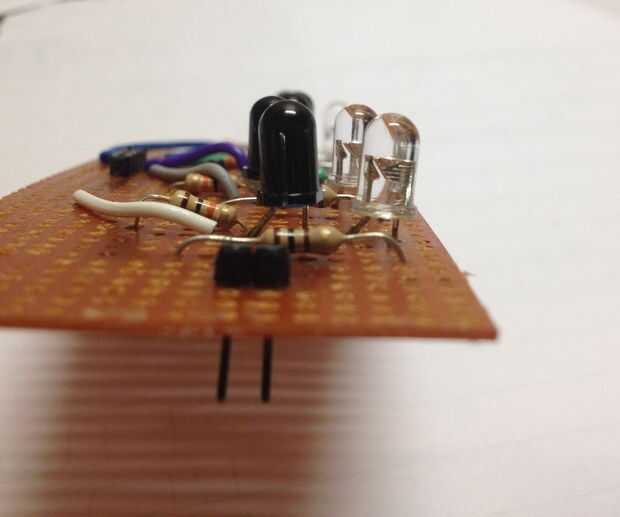
Para la IR LED: el pin más largo es el ánodo y el más corto es el cátodo.
Para el fotodiodo/fototransistor: el pin más largo es el emisor y más corto uno colector.. .another como para identificar el colector es que el lado del lado del fotodiodo es plana.
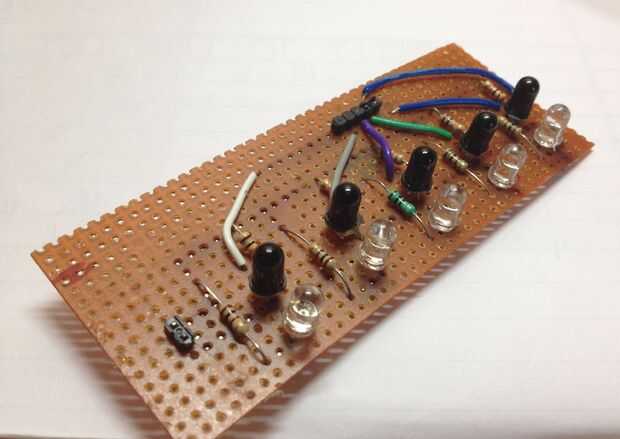
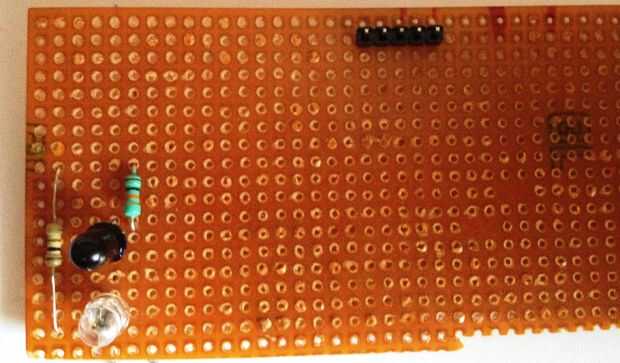
Yo he marcado hacia fuera de cada terminal para el LED IR y el phototdiode. Ahora a soldar...
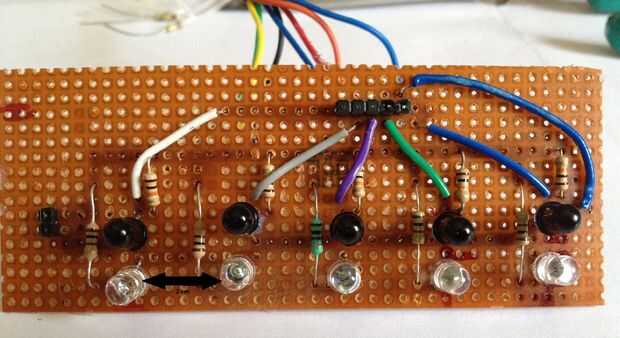
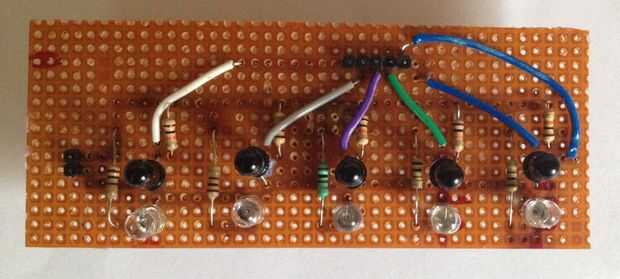
Empezar por soldar pernos de cabecera de twomale para las líneas de corriente y tierra. Luego coloque lo IR led y el fotodiodo como se muestra en la imagen. El ánodo del led y el colector del fotodiodo enfrentan. (más fácil de entender de la imagen).
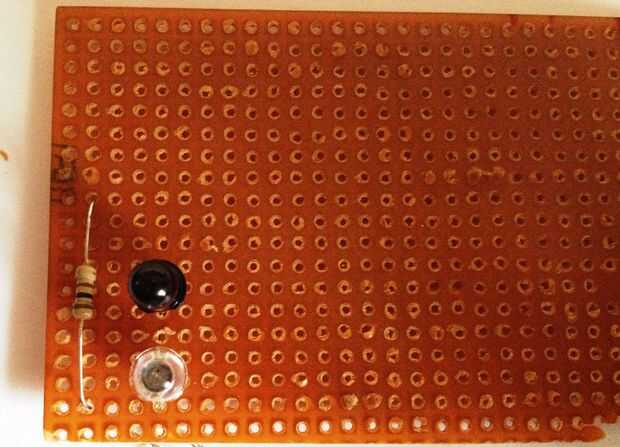
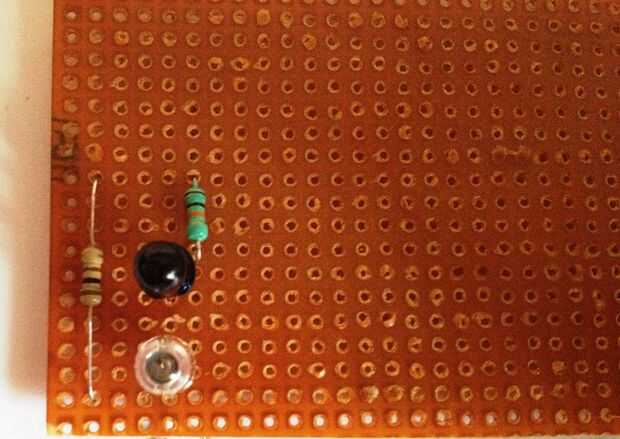
Luego coloque las dos resistencias (10kΩ y 100Ω) de la siguiente manera...
Para la resistencia de 10kΩ: un terminal para el emisor del fotodiodo... el otro terminal a tierra.
Para la resistencia de 100Ω: un terminal al cátodo de lo IR led y el otro terminal a tierra.
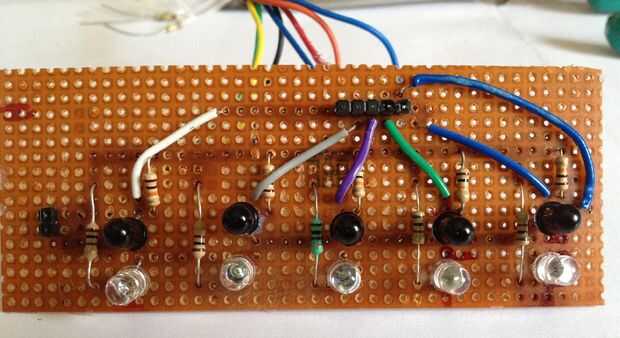
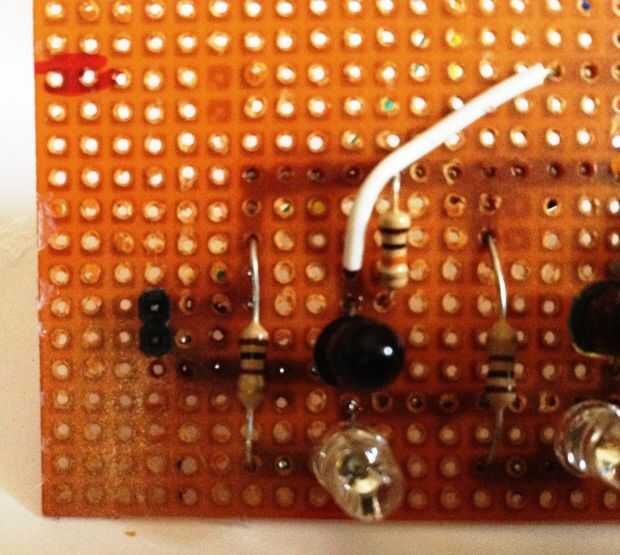
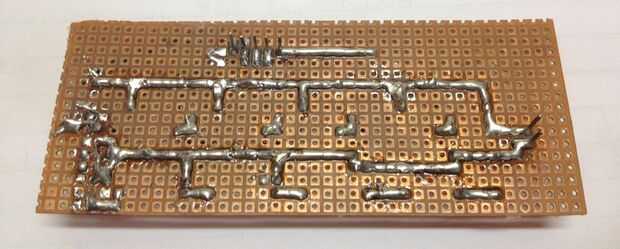
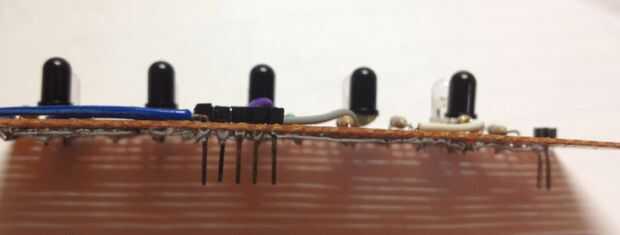
Echa un vistazo a las fotos para una mejor comprensión de las conexiones.
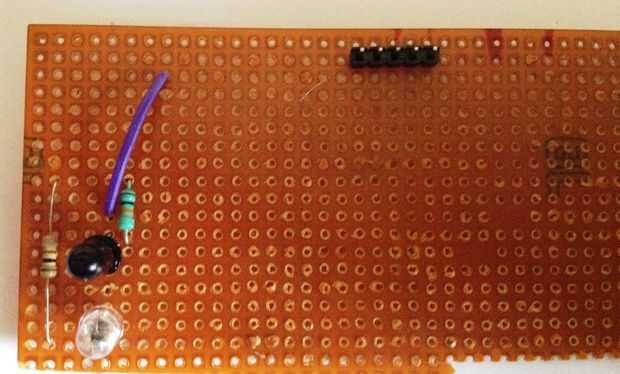
Ahora conectar un conjunto de 5 pines macho encabezado sobre el pcb... Tome un cable y Conecte cada ensambladura de la resistencia 10kΩ y el emisor a cada pin del encabezado. (Echar un vistazo a las fotos).
Siga estos pasos para los otros cuatro pares dejando aproximadamente 2cm entre cada par (esta distancia depende de la resolución que desee para el sensor y el espesor de la línea.)
Ahora a la Junta del Op-Amp...
")












