Paso 1: Preparar el hardware






MCU
Materia troncal de hoy, ATtiny13A. ATtiny13A tenemos diferentes paquetes, estoy usando DIP8 uno, es decir, ATTINY13A-PU.
Titular de una IC DIP8
Para más fácil desenchufar el MCU para reprogramar, se pueden presentar cientos veces.
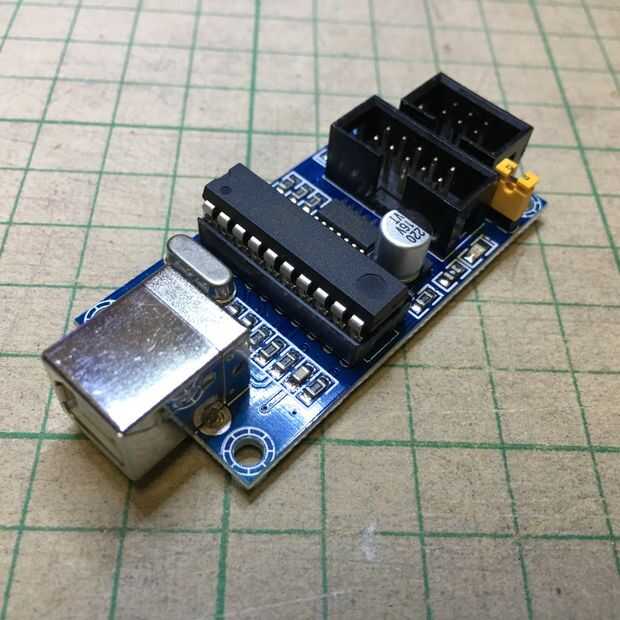
Programador
Estoy usando un USBtinyISP, pero cualquier ISP compatible debe estar bien. Muchas página muestra cómo utilizar un Arduino para programar el ATtiny.
Fuente de alimentación
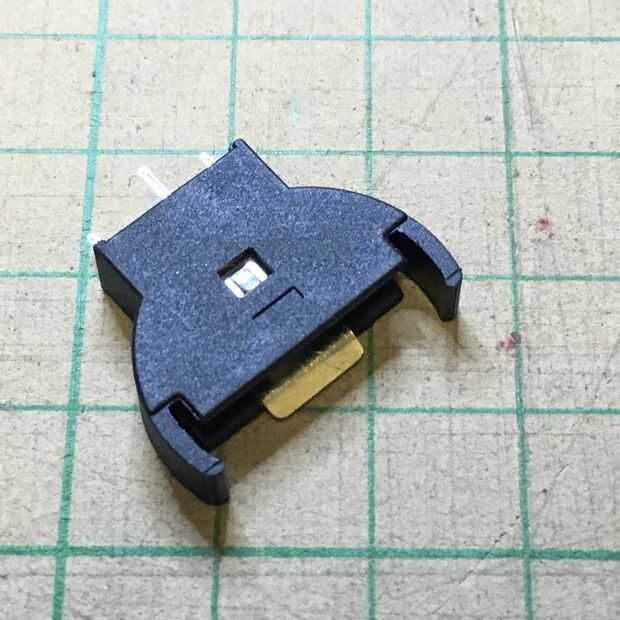
Una batería recargable, LIR2032, es pequeño pero todavía puede proporcionar suficiente corriente para conducir los motores.
titular de celular de moneda de 20mm
Para la celebración de LIR2032.
Un pequeño interruptor
Para más fácil apagar el robot sin desconectar la batería.
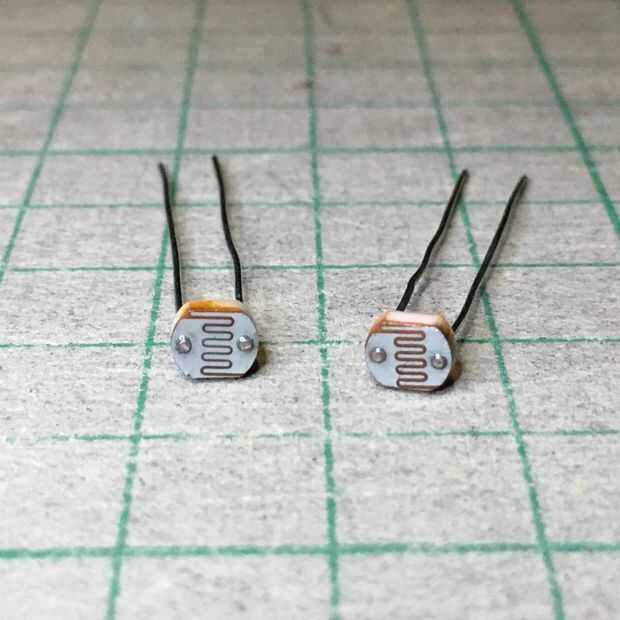
Sensores de luz izquierdos y derecho
En realidad, al principio, quiero usar el emisor de infrarrojos y sensor par. Sin embargo, después de prueba de tres pares de diferentes proveedores, encontré las lecturas es muy depende de la distancia pero no el color. Así que cambié mi mente y selecciona Resistor dependiente de luz (LDR)
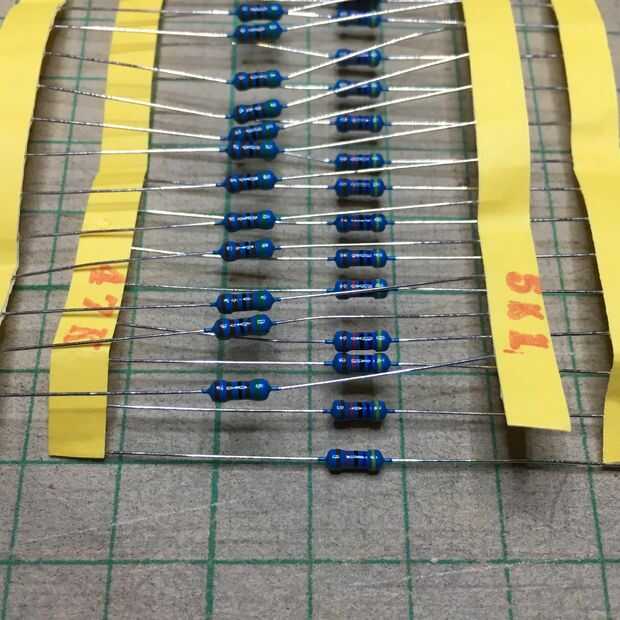
Resistencias de Pull-down de izquierda y derecha para sensores de luz
He encontrado muchos post en el pull-up de web uso 10k ohm o el resistor de pull-down, pero he encontrado 47k resistencia de ohm tiene una mejor lectura, por eso elijo
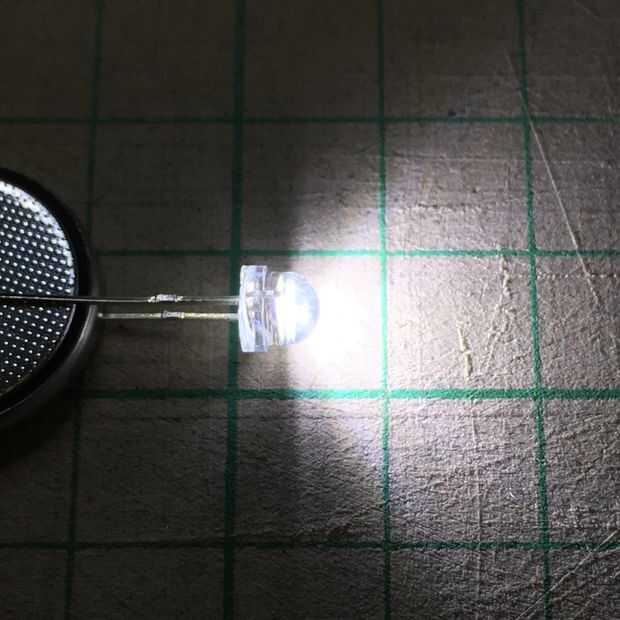
Fuente de luz
LED blanco 5mm con sombrero de paja se prefiere, porque necesitamos una fuente de luz gran angular.
Resistencia de la fuente de luz
Un LED blanco puede consumir decenas de MA pero es excesiva ya que sigue líneas sólo requiere fuente de luz para unos mm la distancia. Así que agregamos un 5,1 k resistencia de ohm para reducir consumo de energía, el valor de resistencia muy depende el funcionamiento del LED.
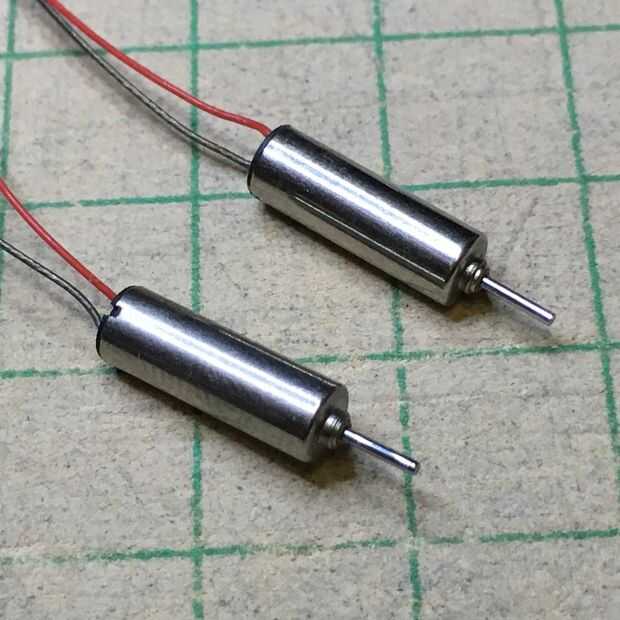
Motores izquierdos y derecho
Más consumo de energía se viene de los motores. Según la especificación de ATTINY13A, la máxima corriente por el Pin de E/S es de 40 MA. Por simplicidad, no quiero ningún transistor adicional para conducir los motores y LIR2032 no disponen de demasiado poder para hacer eso. Por eso elijo un motor pequeño que sólo consumen alrededor de 20 MA.
Rueda
Ya que no quiero añadir más engranajes, la rueda debe tan pequeño como sea posible para reducir la torsión requerida y reducir el consumo de energía. Se viene el diseño de la rueda de Shlonkin.
Chasis y la rueda delantera
En la primera carrera, sólo trato el LED como la rueda delantera. Funcionamiento suave en el libro blanco y la superficie muchos pero difícil de ejecutar en la línea. Después de pocos días de ensayo, encontré que es causada por los productos superficie pegajoso por la tinta del marcador. He trato de unos diseño de rueda delantera, pero difícil de avanzar, suaves izquierda y derecha al mismo tiempo. Por último utilizo una bola de acero de 8 mm para hacerlo. Es muy fácil pegar los motores por el pegamento caliente, pero ya que yo no puedo dirigir pegamento la bola de acero como una rueda delantera y suerte que puedo usar una impresora 3D ahora mismo. Así que imprimí un chasis para los motores y tracción delantera. Si también se puede utilizar una impresora 3D, puede intentar imprimirlo aquí.
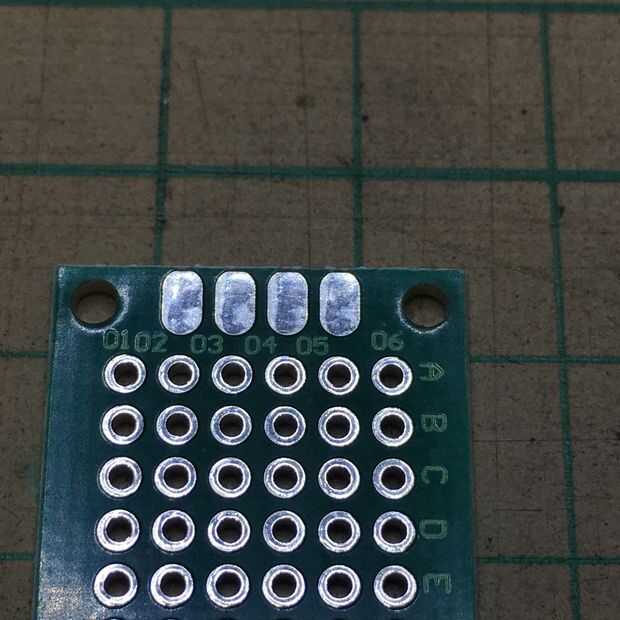
Un tablero de PC multiuso
Requieren 6 x 5 agujeros tablero multiuso para pegar todas las piezas juntas.




")








