Paso 10: Movimiento Vertical con el CVS





Para este movimiento se utilizó otro motor, como se especifica fue 9g motor servo acoplado a una inclinación del soporte de la cacerola y también cerca de la cámara. (ver fotos del paso).
Por último, hemos desarrollado un mecanismo para obtener la información desde el eje de Y y de una manera que se produce además de los movimientos horizontales y abordar el movimiento de la cámara vertical. Para que fue utilizado por la cámara, un soporte de inclinación, que permite el movimiento vertical del receptor artificial con el fin de seguir el movimiento del objeto (color verde) en el eje Y que su montaje se realizó frente al sistema, permitiendo a la cámara puede "ver" el objeto antes de que choca con el chasis.
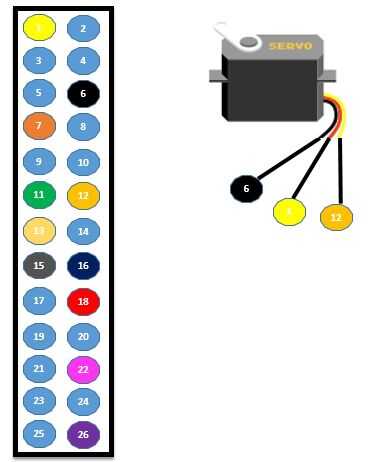
Este apoyo (inclinación) tiene un microservo, que es el responsable por el movimiento vertical del soporte junto con la cámara del motor. Se activa mediante un controlador de ancho de pulso modulación (PWM) para su uso fue necesario instalar un Kernel disponible para este recurso.
El núcleo elegido fue Occidentalis v0. 2 de Adafruit (haga clic aquí para descargar), que incluye normas para la declaración de la sirvienta. Estos estándares están escritos los códigos en un archivo durante la ejecución del script y son hechos por una función. Este núcleo permitió activar un controlador PWM de la GPIO 18 (pin 12) lo que permite la rotación del servomotor en un ángulo en grados desde 0 grados a 180 grados.
Para realizar correctamente la regulación vertical utilizando el soporte de inclinación se ha desarrollado una técnica similar a la botella, donde la lógica es utilizar el marco del centro y el eje Y de un límite superior e inferior realizar el ajuste vertical de un receptor artificial. Es aceptable el valor de Y del objeto a permanecer en el 60% permisible similar al ajuste horizontal, el soporte vertical que no se mueve, si excede el 30% en la parte superior, es un ajuste al límite del motor servo (180 grados) si es necesario. Si el valor de Y del objeto supera 30% en la parte inferior en relación con el centro del impuesto del eje Y, se hizo un ajuste para limitar el motor servo (grado 0) si es necesario.
Mira este video (bueno el objeto rojo se utilizó sólo para el test!):
El "MOVIMENTO_VERTICAL.py" se refiere a voluntad de algoritmo este movimiento. Ahora sí!!!!!! El robot está listo para implementar características de visión por computador para aprender los movimientos y móviles en todos los ángulos y movimientos!
Casi lo ha hecho nuestra máquina de matar! :-)













