Paso 9: Horizontal y en profundidad de movimiento usando el pt2 CVS.
Este paso se describirá en profundidad y movimientos horizontales.
Pero que servirá el movimiento profundo??? Sí, este movimiento es útil!
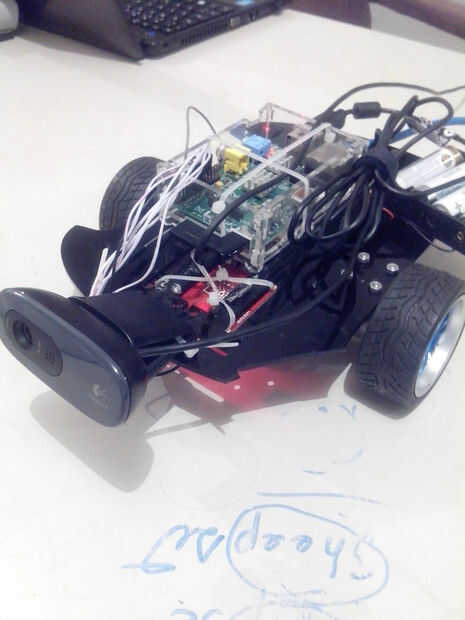
Fue desarrollado para permitir que el chasis mover hacia adelante y hacia atrás en orden para él hacer zoom dentro o fuera del objeto (color verde). Este movimiento se basa en el área del color deseado (verde) en la imagen / marco. Para esto era el pensamiento lógico: no el objeto excede la distancia deseada y podría chocar con el chasis o incluso a distancia, el punto de los chasis de perder de vista y no se puede sorprender! Este caso se ha establecido un tamaño mínimo de los 50 píxeles de objeto que es equivalente a aproximadamente 50 cm del chasis (puede variar en su proyecto). Y a través de un límite de área, el sistema será estática (sin movimiento) y así el objeto de abordar o dejar, se hace ajuste mínimo y máxima distancia en orden para no perder el objeto o evitar el objeto de colisión con el chasis. El código "MOVIMENTO_PROFUNDIDADE.py" es un ejemplo de este movimiento.
A continuación un ejemplo de video! ¡ Disfrútala! :-)
Junto con el movimiento de profundidad será descrito el movimiento horizontal. Pero ¿por qué Saymon?? Porque ambos usan los mismos motores! : P
Se analizan todas las funciones de control y dirección de set para el robot podía moverse en el mismo eje (en este caso, mover izquierda y derecha). Como el control horizontal, estos motores se configuraron para ser móviles usando la coordenada de X eje (horizontal), que incluso la coordenada del eje X para la toma de decisiones y ajustes necesarios.
El ajuste se realiza como sigue:
Junto con el movimiento de profundidad será descrito el movimiento horizontal. Pero ¿por qué Saymon?? Porque ambos usan los mismos motores! : P
Se analizan todas las funciones de control y dirección de set para el robot podía moverse en el mismo eje (en este caso, mover izquierda y derecha). Como el control horizontal, estos motores se configuraron para ser móviles usando la coordenada de X eje (horizontal), que incluso la coordenada del eje X para la toma de decisiones y ajustes necesarios.
El ajuste se realiza como sigue:
Se inicia de la segmentación de la estructura y proceso y secuencia de pasos son dinámicos, es decir puede cambiar según la necesidad de ajuste. Donde el área mínima (considerado experto) se estableció que 50 píxeles, que es equivalente a aproximadamente 50 cm de la base. Una característica de visualizar un círculo en el centroide del objeto fue utilizada para mejorar la interpretación del reconocimiento en todos los movimientos, así como la integración que presentará en los próximos pasos. Para realizar correctamente las funciones de ajuste horizontal, se desarrollaron una lógica para todas las etapas de segmentación, extracción de información de imagen y técnicas de ajuste horizontal. Este utiliza técnica limita el centro del marco como un marco de referencia y de ella, un lado de limita el derecho y la izquierda, lo que es aceptable para conducir hasta un 60% del área total del eje en el eje X, es decir el 30% en cada lado, teniendo en cuenta el centro de la estructura. Si las coordenadas satisfacen los límites impuestos, el chasis no realiza ningún movimiento; los motores se paran (off), considerando un determinado al objeto horizontal.
Para este caso el código "MOVIMENTO_HORIZONTAL.py" ejemplifica!!!! Prueba y continuará nuestro proyecto!!
Después de este paso, vaya al movimiento vertical que utiliza otro motor motor! :-)













