Paso 4: Montar y cablear el robot
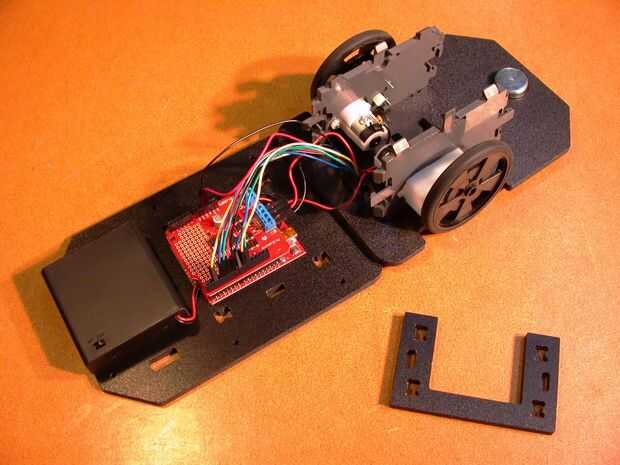
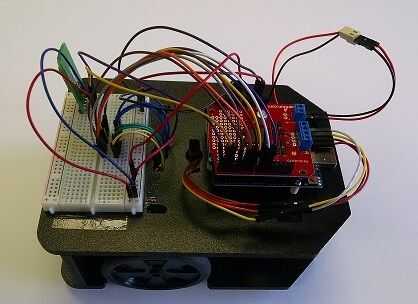
Mirar por encima de su kit de la robusteza y decidir cómo le gustaría a montar. Si bien hay muchas maneras posibles, mostramos dos ejemplos. Un estilo de cableado adjunto con todos los componentes electrónicos y cables dentro de la versión abierta y expuesta con el controlador en la parte superior.
El robot del alambre con los cables del puente como sigue:
- Pin Ardumoto Digital 2 - Sensor de QTR pin1
- Pin Ardumoto Digital 4 - Sensor de QTR pin2
- Pin Ardumoto Digital 5 - Sensor de QTR pin3
- Pin Ardumoto Digital 6 - QTR Sensor pin4
- Pin Ardumoto Digital 7 - Sensor de QTR pin5
- Pin Ardumoto Digital 8 - Sensor de QTR pin6
- Pin Ardumoto Digital 9 - Sensor de QTR pin7
- Pin Ardumoto Digital 10 - Sensor de QTR pin8
- Ardumoto GND - pin Sensor QTR GND
- Ardumoto 5V - pin QTR Sensor VCC
- Ardumoto Terminal 1 - cable negro del motor izquierdo
- Ardumoto Terminal 2 - cable rojo del motor izquierdo
- Ardumoto Terminal B 3 - cable negro del motor adecuado
- Ardumoto Terminal B 4 - cable rojo del motor derecho
- Ardumoto Terminal VIN (+) - cable positivo rojo del portapilas
- Ardumoto Terminal VIN (-) - cable negativo/negro del portapilas
(Nota: el Pin Digital 3 es saltado y utilizado por el conductor del motor Ardumoto. Ardumoto también utiliza pines 11, 12 y 13)




 V:1.1")








