Paso 7: extensión




Durante la depuración de programas, hay todavía muchos problemas deben ser resueltos por ejemplo el motor tiembla causado por la inercia de la pierna.
¿Cuál es el uso de este robot? No estoy seguro, pero al menos es un juguete y un dispositivo programable para la formación de la FPGA.
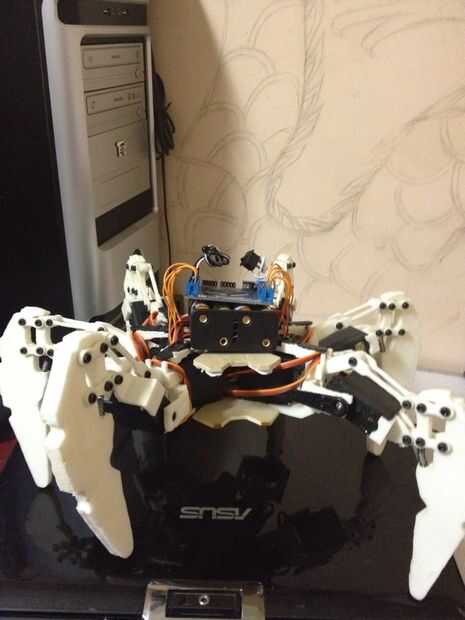
Por último pero no menos importante, usted puede ampliar su función como usted desea. Por ejemplo, utiliza un sensor IR en esta primera generación, pero podemos extenderlo totalmente con un módulo wifi y Protocolo de comunicación wifi y tal vez escribir una aplicación IOS para controlarlo con el IPHONE. Además, podemos fijar una cámara en la parte delantera del chasis que puede transmitir imágenes y vídeos o incrustar una imagen procesamiento de módulos para buscar un determinado objetivo.
Finalmente gracias por su amable lectura. Esta es mi primera vez escribir instructables, y me alegro de conocer tus comentarios. Si usted tiene cualquier pregunta o sugerencia, por favor me deje un mensaje. Declarar una vez más que este robot está inspirado en el Robot de Kondo KMR-M6 en la plataforma ASIC y este artículo no es de interés solamente, propósito comercial.
wang de Adán
2013.02.27



")


")

")


. ¿")

")