Paso 7: montaje




En primer lugar vamos a montar tres servos en la parte superior de soporte de la batería. Despegar las pegatinas de los lados de nuestros servos – estamos pegado servos, no pegatinas.
Las lengüetas de montaje, no las necesitamos y están tomando demasiado espacio. Tenga cuidado, casos de servo son muy frágiles.
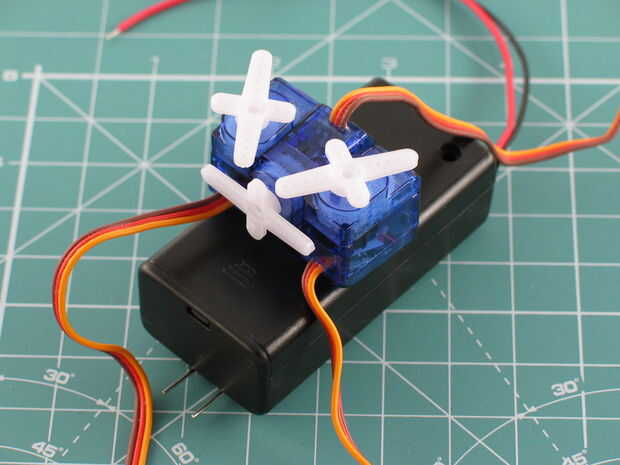
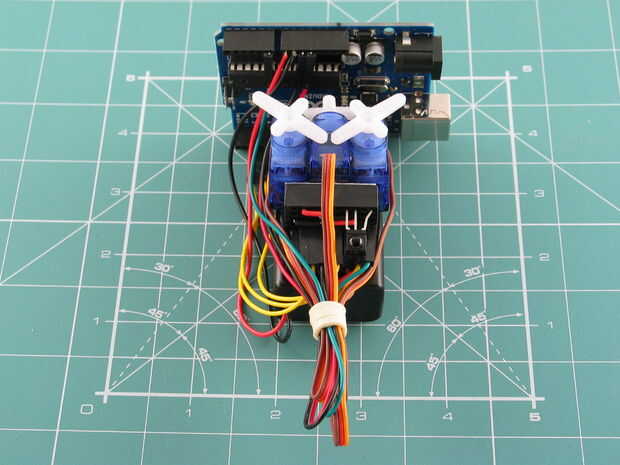
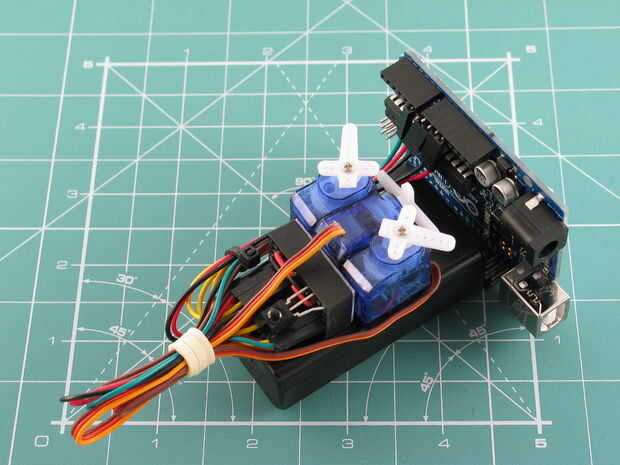
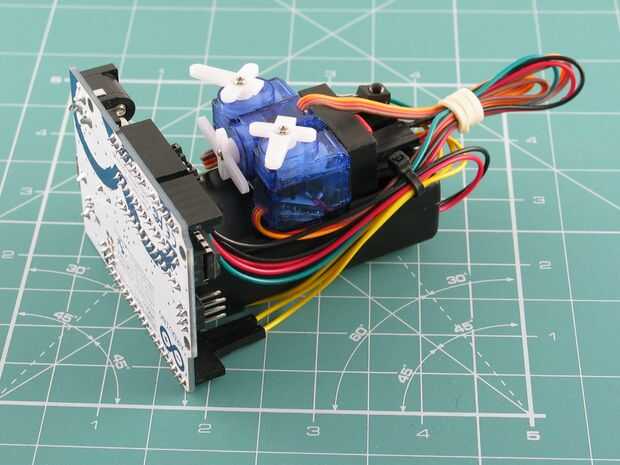
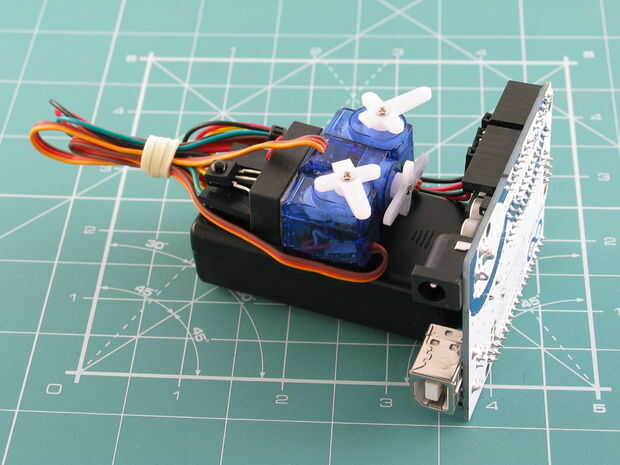
Tomar un servo y péguelo a la parte superior del soporte de la batería. Esto sería servo central para medias piernas. Es la salida de eje debe ser dirigido hacia el controlador. Trate de colocar el servo al igual como ves en mis fotos. Tenga en cuenta que debemos dejar algo de espacio para un protoboard pequeño al lado del servo y un espacio delante de él para montar las piernas medianas.
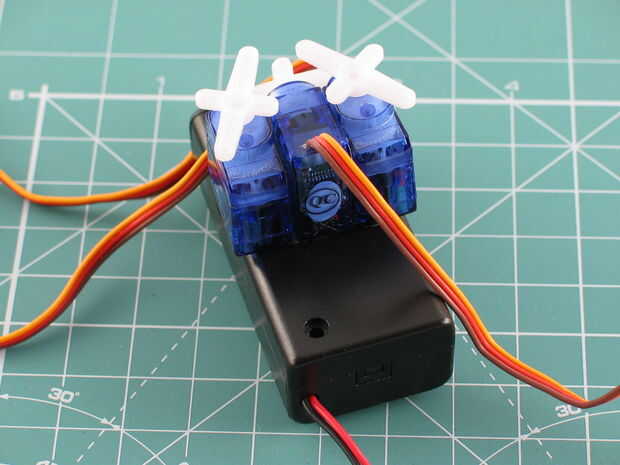
Pegar otros dos servos para el soporte de la batería y a los lados de la primera pero suba sus ejes de salida.
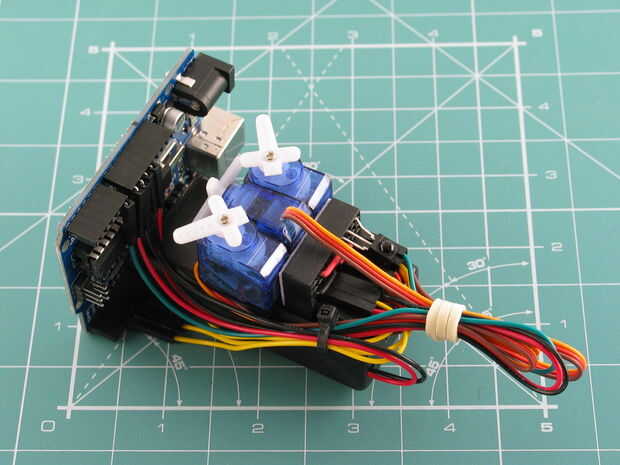
Ahora vamos a montar nuestro protoboard. Despegar la pegatina que protege el pegamento de la cinta. No confío en esta cinta por lo que recomiendo poner algun pegamento caliente justo por encima del pegamento de la cinta y a un lado largo de la placa. Comprobar las fotos para ver el resultado.
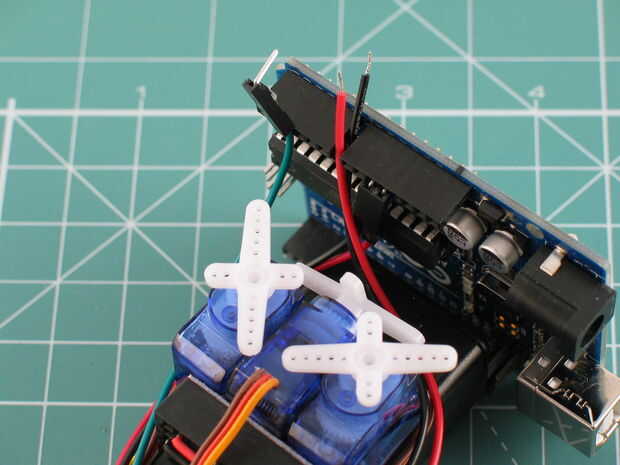
Repetir el circuito que has hecho en el paso de creación de prototipos. Os adjunto la foto de ella a este paso otra vez. Tenga en cuenta que deberá efectuarse receptor IR para arriba.
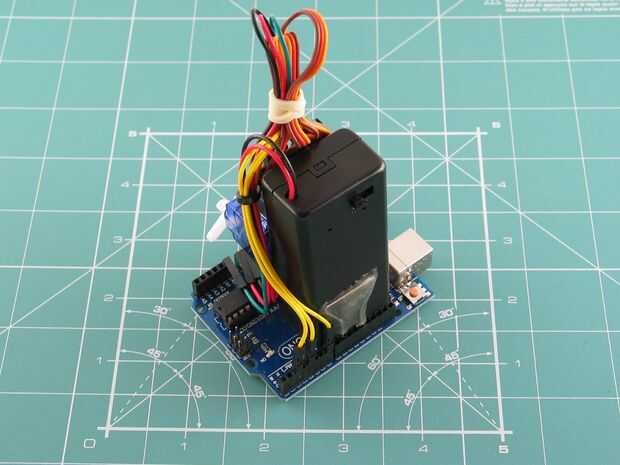
Me enfrenté a dos dificultades mientras se conectan los cables al controlador. La primera es que los cables de mi salto tenían demasiados conectores. Y cuando yo esté conectado a + 5V, GND y A0 pernos mis servos no podían moverse. Para resolver este problema solo dobla los conectores a 90°.
Otra dificultad es que los cables de soporte de la batería son demasiado delgados. No podía fijarlos en pins Vin y GND del controlador. La solución rápida y fácil es doble piso los cables. Lo probé (se puede ver en la foto) y funciona. Pero francamente tengo miedo que estos cables podrían ser roto sea para enchufar y desenchufar las conexiones varias veces. Por eso usé conectores - los mismos conectores que en los cables de salto.
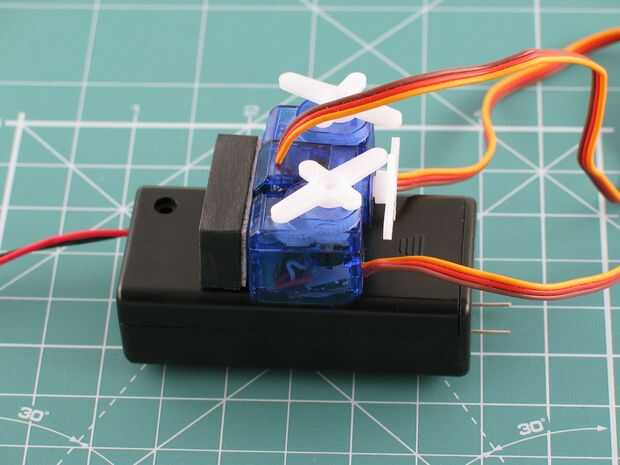
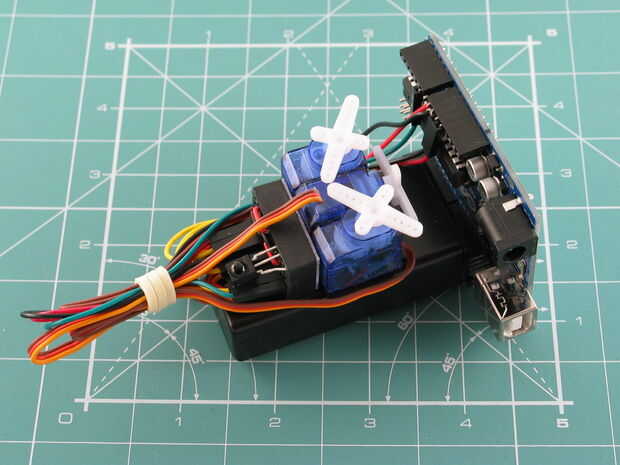
Ahora encienda el interruptor en el soporte de la batería, toma el IR remoto y comprobar que Ringo. Después de enviar el comando de stop el bosquejo mueve servos a cero posición (90°). Es una posición segura para montar cuernos servo. Sugiero para usar cuernos cruzados. Cuerno para servo medio deberá estar orientado horizontalmente. Y los cuernos para servos de izquierda y derecho deben ser orientados a 45° a los lados. Revise las fotos.
No te olvides de tornillo cuernos servo. Y corte largo interiores partes de los cuernos que pueden entrar en conflicto entre sí mientras se mueve.





")







