Paso 4: Transmisión de datos al Quad sobre Xbees

Procesamiento de OpenNI
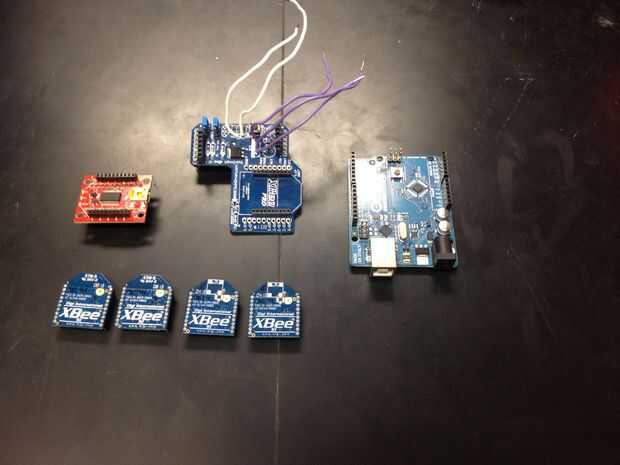
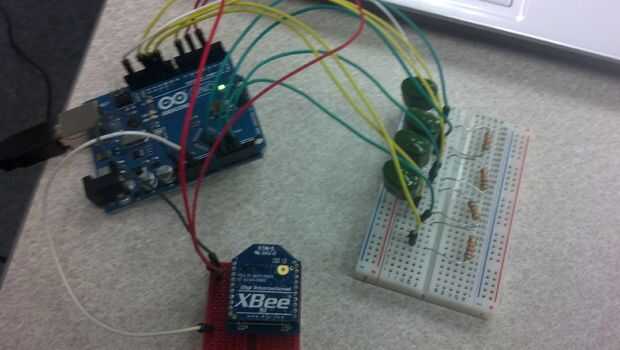
Dos Arduinos
Dos XBees
Dos exploradores de XBee
Dongle de XBee.
Para el esbozo de procesamiento control de los movimientos de la mano para ser leído por Arduino, necesitamos hacer que el procesamiento de datos puede ser enviado a y utilizado por Ardunio. Esto se logra mediante la transformación de la biblioteca Arduino disponible aquí: http://playground.arduino.cc/interfacing/processing. Después de instalar la biblioteca según las instrucciones se pueden utilizar los ejemplos enumerados para iniciar la interconexión entre procesamiento y Arduino.
Con esta biblioteca instalada, hemos sido capaces de vincular nuestro ejemplo modificado de manos con un sketch de Arduino. Usted puede encontrar nuestro ejemplo de manos modificado, llamado QuadCopter_HandTracking.pde en nuestra página de GitHub.
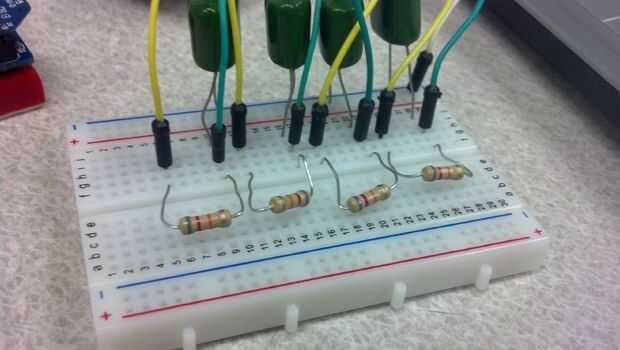
Vinculamos este archivo con un bosquejo Ardunio que lee los valores del sensor Kinect (salida en el Arduino mediante pines digitales) a través de pines analógicos después atraviesa un filtro RC para aumentar el voltaje de 0 a 3v. Este bosquejo puede encontrarse también en nuestra página de GitHub.
Tanto este bosquejo, el bosquejo receptor utilizar la biblioteca de EasyTrasfer de Bill Porter, que se puede encontrar aquí: http://www.billporter.info/2011/05/30/easytransfer-arduino-library/
En este punto es tiempo de ocuparnos Xbees. Se utilizó la serie 1s para nuestro proyecto. Para configurar el XBees, uno necesita instalar X-CTU. Se puede encontrar aquí: http://www.digi.com/support/kbase/kbaseresultdetl?id=2125
Para conectar a un XBee primer clic texto o consulta en la configuración del PC para asegurarse de que el programa puede leer tu XBee. Si te lanza un error, asegúrese de que la velocidad en baudios se establece en el tipo correspondiente (9600 es el predeterminado, la nota debe ser cambiado siempre y cambia la velocidad individual de XBee). Una vez probado con éxito, haga clic en lectura en la configuración del módem y el X-CTU poblarán la pantalla con los parámetros actualmente escritos el XBee. Haga clic en escritura (el proceso para conectar diferentes es igual a la primera) y el formato el XBees de la siguiente manera:
XBee de tierra:
-PAN ID = 3002 (puede ser cualquier identificador que desee, sólo asegúrese de coincide con el del aire XBee)
-Destino dirección baja = 1
-MI dirección de fuente de 16 bits = 2 (básicamente, vincular dos XBees la DL & mi de cada uno deben ser lo contrario de uno a otro)
-Interfaz de tarifa de datos = 57600 6
-Frecuencia de muestreo = 14
XBee de aire:
-PAN ID = 3002
-Destino dirección baja = 2
-MI dirección fuente de 16 bits = 1
-Interfaz de tarifa de datos = 57600 6
-Frecuencia de muestreo = 14
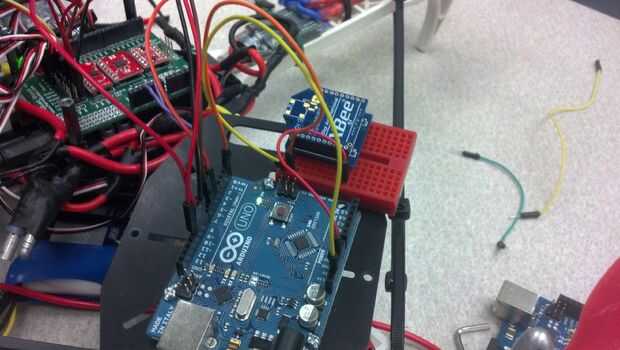
Una vez sus XBees todos, gancho hasta el circuito de tierra y el otro al circuito de aire. El bosquejo para el aire de Arduino puede encontrarse en nuestra página de GitHub.
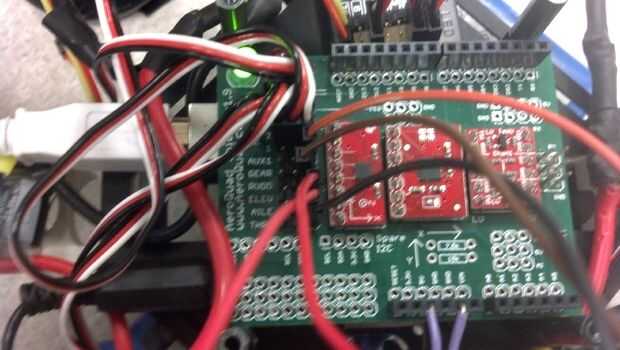
En el tablero de vuelo, conecte las clavijas enunciadas el bosquejo a sus correspondientes pines S, usted no tiene que preocuparse por el + o - en este caso de los pernos. Para la referencia, en nuestros términos THRO = gas, AILE = rollo, ELEV = pitch y RUDD = desvío.
Una vez hecho esto, abre el configurador de AeroQuad y comience a transmitir. Puede que sea necesario restablecer el aire y la tierra juntas: sabrás datos están listos para recibir cuando los valores se muestran dentro de los datos del transmisor mostrarán todos flotar cerca de 1500 (1250 para la válvula reguladora y 1000 para aux).













