Paso 7: Controlador personalizado
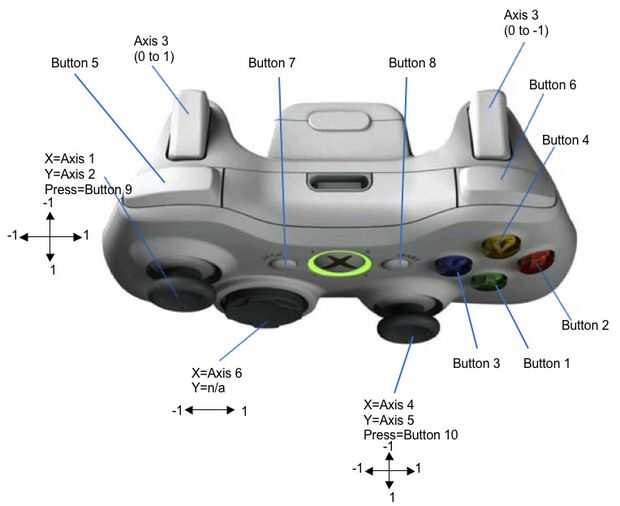
Su equipo de unidad puede venir hasta usted y decir, "Queremos utilizar para mover nuestro robot". Con este ejemplo mostraré lo fácil que es adaptar su código a un controlador que no sea el Attack3. Como nota lateral, controladores de Xbox suelen ser no un controlador muy bueno para conducir tu robot. La marca de joysticks asimétrica conduce recto un desafío con unidad de tanque y el pequeño tamaño de los joysticks hacen los controles muy susceptible. Para empezar, descarga el programa de utilidad de explorador de Joystick para WPILib. Puesta en marcha y conectar el joystick. Asegúrese de que el controlador se selecciona en el menú desplegable. Mover los joysticks y observar qué cambios de número de ejes. Debe registrar una x y un eje y para cada uno de sus joysticks (y tal vez un eje z dependiendo de su controlador particular). Ahora vas a tu código y poner estos números de ejes a utilizar. Eliminar su actual función de myRobot.TankDrive o myRobot.ArcadeDrive y agregue el código siguiente en la función periódica de teleop.
Unidad de tanque:
Unidad de tanque con eje de Z para la velocidad:
Drive Arcade:
Drive Arcade con eje de Z para la velocidad:
Por supuesto, usted necesitará cambiar modificar nada con < > alrededor de él para que coincida con el número de ejes que grabó desde el explorador de Joystick.




")



")




