Lo que es:
Este dispositivo toma la señal desde un receptor RC, la clase enchufas tus servos en un coche de RC o un avión. Basado en esa señal RC salidas de energía controlada a la par de los motores hasta 18V y 4A. El control es proporcional (velocidad variable) y va en ambas direcciones sin prejuicios en cualquier dirección, lo que es adecuado para vehículos tanque. La lógica se basa en un PIC18F1320. La mejor parte de este proyecto es no sólo que le permite hacer un controlador de motor dual RC relativamente barato, pero que mediante este esquema de código y la entrada puede llevar cualquier proyecto de microcontrolador PIC y agregar radio control con tantos canales como quieras usando sólo un pin para recibir todo. Además de usar esos valores para controlar otras funciones del robot puede todavía utilizar cualquiera de los puertos de su receptor, incluyendo las que van a la Junta de control, para el control de servos.
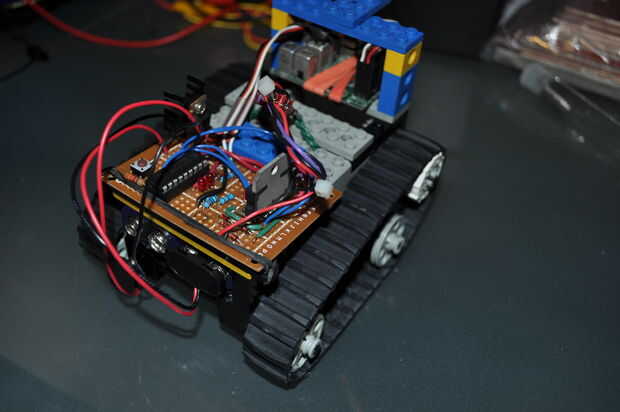
Porque no es que divertido controlar dos motores sin un robot a coche he construido el sistema en un robot de Lego. Este regulador del motor podría ser utilizado para cualquier robot de buey de la resbalón, o se podría simplificar a un motor, usar el otro puerto para un servo y un vehículo que dirige como un coche. Si la pieza de Lego del proyecto es de interés para los conectores están explicados en el paso 4 y el cuerpo de lego es poner hacia fuera en el paso 5.
Este proyecto requiere herramientas electrónicas básicas y un programador que puede trabajar con chips de la serie 18F.
El hardware:
El hardware electrónico es bastante simple. El 18F1320 PIC se encarga de todo la interpretación de las señales, que requiere sólo 2 diodos de filtrado. El mismo chip genera señales de control del motor para ambos motores. El otro chip grande en el tablero es un controlador de motor L298n. Este chip contiene dos H-puentes capaces de manejar un motor con hasta 4A de corriente hasta 18V. Además de las fichas el otro un componente grande es un regulador de 5V para dar a la foto una buena alimentación. Además de aquellos que tienen un puñado de baratos diodos y resistencias. Una lista de partes específicas es en el paso 1.
El software:
El software para el chip tiene una porción que interpreta las señales de control de servos PWM * en una variable, y otra parte que genera el control del motor dos PWM * señales. Estas piezas cada uno pueden utilizar para hacer un sistema que hace algo más basado en comandos de control de radio, o un controlador de motor que es impulsado por otros medios. El código podría ampliarse fácilmente para leer muchos (hablo de 8 o más) señales PWM. Podría tomar uno de esos grandes sistemas de control remoto $500 avión y tiene un chip de leer todos los canales! Qué hiciste con todo lo que los datos de control sería suya.
Una nota sobre PWM:
Estos son tanto ancho de pulso moduladas señales (PWM), que significa simplemente la anchura de los pulsos se utiliza para representar los valores, pero la señal de control del motor impulsos de encendido y apagado para variar la potencia media, o ciclo de trabajo, para llevar a cabo varias velocidades de motor, mientras que la señal de servo funciona mediante el envío de diferentes anchos de pulso que se leen como valores de mando.













