Paso 6: Conectar el ESCs

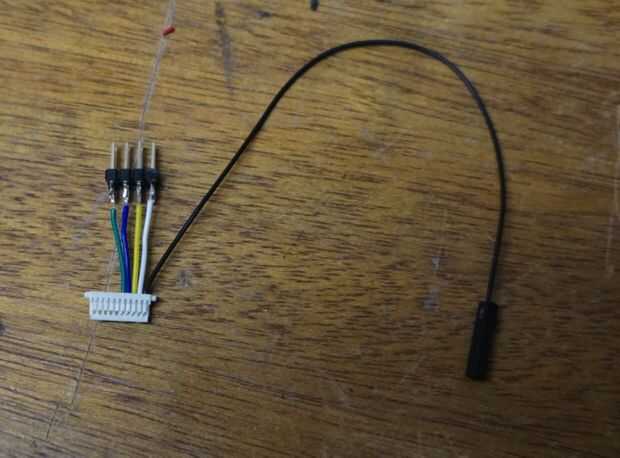





Desembale el otro cable de la posición 10 de mini bolso del Ardupilot. Se puede utilizar un bisturí / cuchillo x-acto Levante las lengüetas de la tapa blanca y quitar los cuatro cables más alejado el cable negro, o usted podría cortarlos con cortadores laterales.
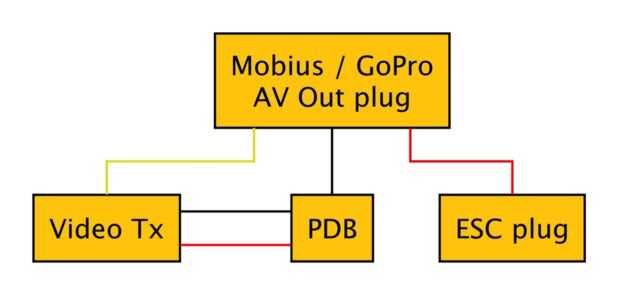
Usted tiene tres opciones de cómo potencia su Mobius / GoPro de la batería. En este paso se describe una de las opciones y alternativas se describen en los siguientes dos pasos. Este paso es permanente y consiste en alambres de corte. Las dos alternativas son no destructiva y reversible.
Si usted elige este método, cortar los cables rojos del Mobius cable y el enchufe de 10 posiciones y soldarlos juntos.
Si selecciona este método, quitar el cable rojo.
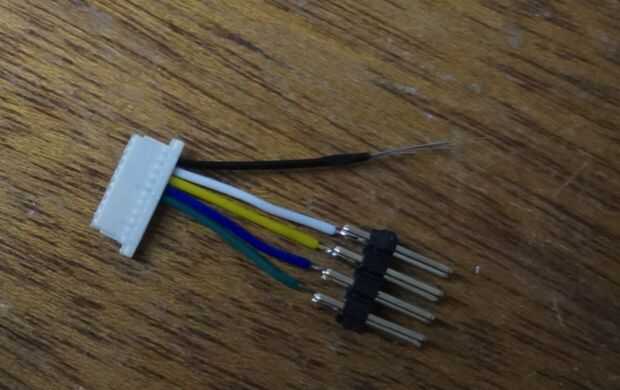
Por alguna razón, el mazo tiene enchufes femeninos a pesar del hecho que CES todos también tienen enchufes hembra. Así que vamos a cortar todos los extremos y convertirlos en un conector de 4 pines combinado.
Romper su estante de pin header para que tengas un bloque de 4 x 2.
Mantenga el cable negro a un lado. Cortar los otros 4 cables cerca de 5cm de largo. La soldadura de los extremos en el lado corto de la fila superior de patillas de la cabecera. Mantenga los cables con unas pinzas mientras tira el aislamiento, si no se lo hacia fuera si la clavija. Si esto sucede, probablemente dañado el conector de metal, para reemplazar con uno de los otros conductores le quita.
Cortar el cable negro de 1cm más largo que le corte los otros cables. Tira de 1cm de aislamiento de un extremo y a lo largo de la fila inferior de pines de cabezal de soldadura para conecta todos juntos.
De calor retráctil o con cinta aislante las uniones de soldadura.
Marque qué fila es tierra y cual fila es señal. Me olvida, se puede utilizar un multímetro para probar. El multimetro a cualquier fila pita cuando dos de sus patillas son tocados y continuidad (el uno que suene cuando toquen las puntas de prueba) es la fila de tierra.
Los CES probablemente tienen sólo dos cables en un enchufe de servo de tres posiciones, con la posición media vacía. Si tienen un cable rojo en la posición media, elimínela.
Esto no enchufe el enchufe de encabezado 4 x 2 así que tienes dos opciones.
-NO se recomienda: Puede mover el cable negro (con el bisturí / x-acto del cuchillo para levantar las fichas) a la posición media. NO es recomendable, como los cables de tierra están ahora en la posición de alimentación estándar. Si mover estos CES a otra máquina y se olvide de pasar el cable nuevo, se corta nuestra y algo.
-Se recomienda: Utilizar el bisturí / x-acto cuchillo para levantar las pestañas y quitar el solo los enchufes de los cables te corte solo. Retire los tapones de los extremos de los CES y en los tapones solo.
Si tienes un disparo o activo de frenado (luz amortiguada) habilitado, no conecte los CES todavía. Instrucciones sobre cómo desactivar la luz amortiguada y un disparo se describen en el siguiente paso. Lamentablemente Ardupilot no permite un disparo o luz amortiguada. Si esto significa nada para ti, intenta averiguar si sus ESCs BLHeli firmware en ellos. Si es así, lea el siguiente paso. Si no, omitir este paso y esperar lo mejor!





")






 utilizando un Arduino")
