Paso 10: cableado
Sin los LEDs no necesita resistencias de cualquier instalación para conectar todo a la arduino debe ser simple. Sólo usé la placa para conectar todos los cables de tierra y 5v.
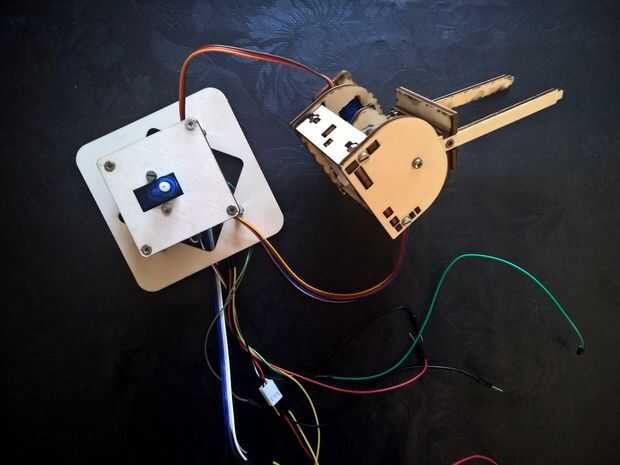
Colocar el robot en la parte superior la base servo y deja que ir a todos los cables a través del orificio en la parte inferior. Que el lugar del robot en el centro de la placa de masa.
En mi código usé 1 pasador de cierre para cada codificador de rorary. Estos son los pins 2, 3 y 7 para el yun de arduino. Una diferencia que pin está conectado a la clavija de cierre si los botones no funcionan correctamente puede debes conectarlos al revés. El pin central de cada codificador rotatorio debe conectarse a tierra. Utilizando este código el codificador izquierdo debe conectarse a los pines 2 y 4, el centro uno a las clavijas 3 y 12 y el derecho a los pines 7 y 13.
El servo de la base debe conectarse al pin 6 y el uno para el brazo al pin 5. Los otros cables de los servos también van a la placa. Finalmente el motor paso a paso está conectado al chip controlador. Este chip está conectado con un 5v y un cable de tierra a la placa. In1 a IN4 está conectado a los pines 8 y 11. Que tendrás que cambiar el orden en que los pernos se colocan si el motor no se mueve.
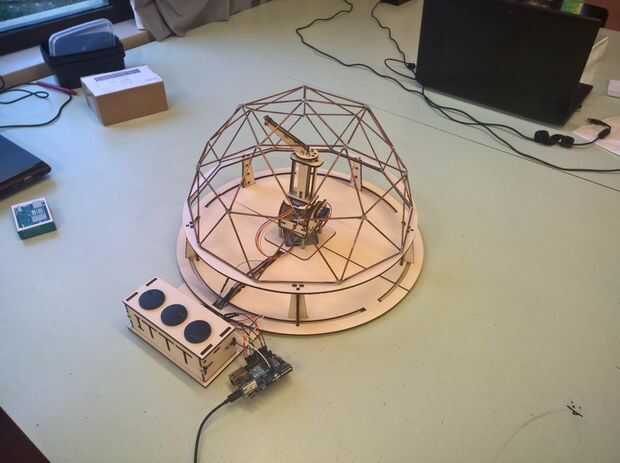
Tenía la esperanza de que tanto el protoboard y arduino podrían caber dentro de la caja de los botones, pero ambos no encajan. Pude obtener la placa interior, poniendo a su lado. Acaba de dejar el arduino al lado de la caja.













