Hércules: El movimiento controlado por Android Robot (6 / 10 paso)
Paso 6: Paso 6: el circuito: controlador de Motor
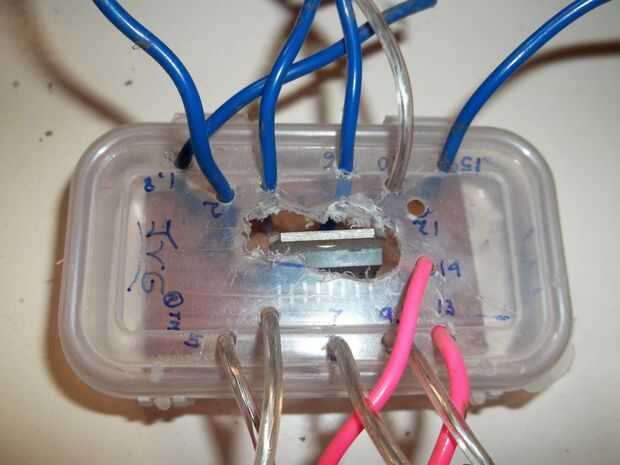
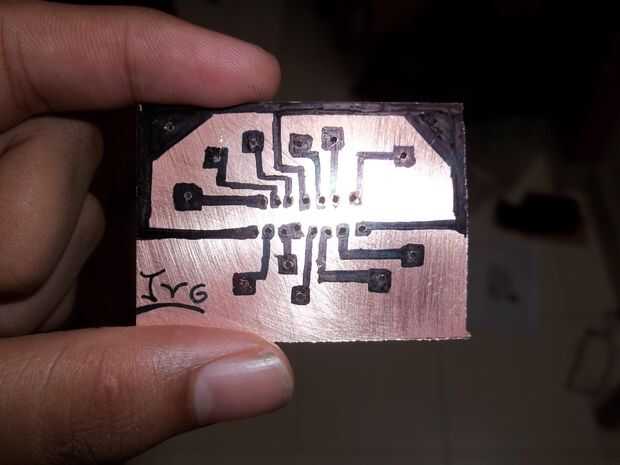
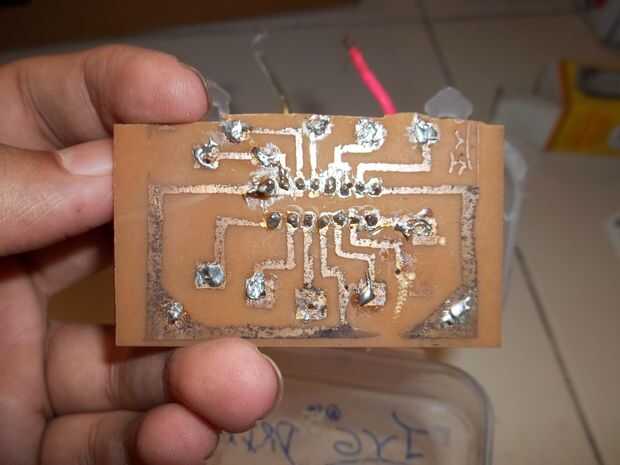
El regulador del motor utilizado para el proyecto es un CI L298. Es un IC de puente H dual que se usa para controlar los cuatro motores del robot. Hice un PCB personalizado grabado para los L298 (Fig. 3) que hace que soldar los cables fáciles a los pines L298. Si no existen los recursos para hacer un PCB personalizado grabado, luego soldar un cable a cada pin del IC L298. Después de soldar los cables, colocar el IC en un pequeño recinto con agujeros perforados en él para los cables dejar la caja. La caja del regulador del Motor debería verse algo como la primera foto.
¿Te gustan los Robots? ¿Eres nuevo en robótica? ¿Es usted pensando en construir un Robot desde cero? Si es así, este instructables es para usted. En este instructables voy a mostrarles cómo pueden construir un robot desde cero, también te muestro cóm
IntroductionEste instructable muestra que cómo puede leer y escribir los pines digitales de tu Arduino Uno y leer los valores de los pines analógicos todo controlado desde tu móvil Android sin hacer cualquier codificación. Este proyecto es plug and p
Para empezar este es mi primer instructivo y mi primer tutorial general. Con esto dijo señala en los comentarios lo que no entiendes en este post.Hace unas semanas tengo curiosidad sobre cómo Bluetooth control de arduino funciona, después de un poco
Estoy seguro que cada uno de vosotros puede encontrar en casa sin usar vehículo RC. Estas instrucciones le ayudará a cambiar su viejo coche RC a regalo original :) Debido a que el coche RC que tenía era de tamaño pequeño he elegido Arduino Mini Pro c
Este instructable muestra cómo hacer un cámara motorizada deslizante. Realmente damos algunas partes adicionales y un regulador manual para hacerlo motorizado controlable por un teléfono con Android. La idea detrás de deslizadores de cámara es para d
Bueno, el objetivo de este proyecto DIY es el poder proceso implementar un vehículo con orugas.El cual cuente con:Transmisión de vídeoLas instrucciones de desplazamiento mar por comandos a través de bluetoothEl "control" de este vehículo, o sea
Nota: Este proyecto funciona con red eléctrica y sólo debe ser realizada por constructores experimentados y conocedores que son conscientes de las precauciones que deben tomarse durante el cableado de alimentaciónEste pfodApp interruptor doble contro
esto es una adición a direcciones impresionantes de Piney. Quería mostrar un calendario de Google con una webcam como un sensor de movimiento para que el monitor sólo se enciende cuando alguien está cerca de él y se apaga cuando nadie esté alrededor.
En este Instructable le mostrará cómo construir un robot que se controla vía Bluetooth con un teclado, tiene una interfaz gráfica de usuario construida con el proceso que muestra la entrada del teclado y realmente convierte la opción todo en una gran
la idea de este proyecto ha sido golpeando alrededor de dentro de mi cabeza durante los últimos años. Finalmente decidí bajar mi trasero y hacerlo. Tenga en cuenta: es un largo instructable porque es una compilación de varias parte, y estoy un poco d
cada verano, Qualcomm celebra una batalla de la competencia de las escuelas, que ofrece a los empleados la oportunidad de representar a su Universidad de origen. Este año, las entradas debían ser artilugios caseros, y que fueron juzgados según lo gua
¡Hola!Primer instructivo...Todos los días en la mañana abro el ciego en 8:00 y apague @ 7:00, así que he decidido automatizar todo el procedimiento.usar un Arduino pro mini 5v, codificador de posición actual, RTC reloj de tiempo, un módulo bluetooth,
Experiencias de movimiento controlado no es necesario limitarse a juegos o dispositivos incluso digitales, realmente se puede lograr una interacción de movimiento sensible mediante el uso de objetos cotidianos sencillos y accesibles.Un ingeniero de a
Esta innovación viene de los movimientos de mano que pueden controlar un robot. En este proyecto utilizo flex sensor y estoy tomando el sensor flex leyendo y poniendo esta lectura a la intel edison. como un valor analógico y manipular estos valores y

")




 mediante bluetooth")


")




