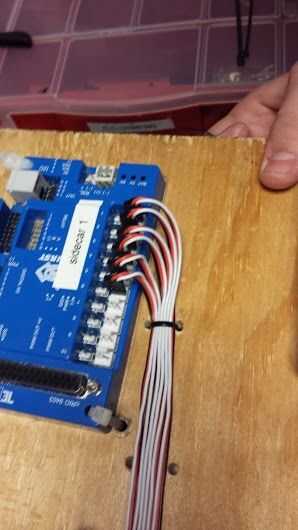
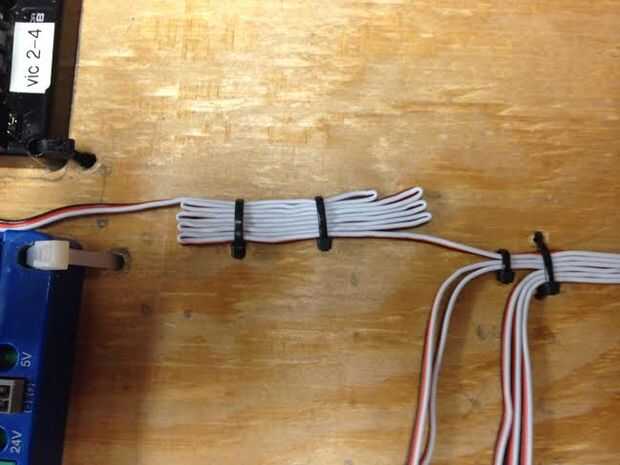
Necesitará hombre mujer Sinuosidal de sidecar a los controladores de velocidad. En primer lugar, asignar y los controladores de velocidad según el sidecar y el puerto que va a correr a la etiqueta. A continuación, conecte el lado femenino de la Sinuosidal en los puertos "PWM OUT" en el sidecar. Doblar los cables para hacer lazos para asegurar que hay cierta holgura y reunirlos todos juntos hacia la misma dirección. Si es necesario, agujeros en el tablero y cremallera atan en lugar. Luego conecte el lado macho en los controladores de velocidad adecuada y encontrar un lugar seguro en el tablero y asegure el cable extra incluido. Cuidadosamente doble los cables en sí mismos y zip empate en lugar. Paquete de ellos por separado así que son fáciles de reemplazar si es necesario. Cuando se ejecuta, asegúrese de que no hay estrés o tensión a los cables ya que podría provocar daños.
Va este instructable sobre cómo configurar los cables para el proyecto de robot justas.El proyecto de robot justas utiliza 3D piezas impresas, LabVIEW, servos, sensores y el chipKIT WF32. Si usted está interesado, Digilent vende el Kit de computación
Para la inspiración y reconocimiento de la ciencia y la tecnología (el primero) es una organización con la misión de inspirantes jóvenes se involucren en la ciencia y la tecnología mediante el uso de programas que les dan experiencia en diversas área
en la parte 2 de este tutorial, se introducen detalles de piezas y el cableado. Usted aprenderá cómo construir el Control del Robot RC paso a paso. También proporciona la base para la parte 3 que se muestra cómo conectarse a un puente H y motores. ¡
primero es organización patrocina competiciones de robótica para niños de todosaños de edad. La competencia de robótica primera (FRC) es el evento de la escuela secundaria dondelos equipos compiten cada año para resolver un desafío de ingeniería de r
(Si te gusta este Instructables, no olvide votar en ella (por encima de: bandera de la esquina a la derecha). está compitiendo en concursos de automatización y de INTERNET de las cosas. ¡Muchas gracias! ;-)En este instructables, aprenderemos cómo cre
El objetivo de este proyecto es desarrollar un chasis miniatura para experimentar con robots de enjambre muy básico. La inspiración principal es fantástico proyecto MIT de James McLurkin la http://www.ai.mit.edu/projects/ants/de principios de los 90.
Propósito y descripción de esta guíaEste instructable es una mano para un proyecto escolar que hemos hecho. El propósito de este proyecto era crear un control de brazo robot utilizando thumbsticks. Tuvimos que utilizar un Arduino Uno para el control
¡ Hola! Esto es parte de un tutorial de dos partes sobre cómo hacer un controlador de velocidad de un resorte de tapa y pluma de botella! Si no lo has hecho todavía, ¡ pruébelo! Si te gusta, por que no votar por mí en el concurso de sensores! ¡ Graci
¿Se puede saber por qué me he emocionado por este proyecto? ¿Sabe usted cuán seriamente frío es?No, Jay " Puedo oírle decir, suspirando como usted mismo fortalecer otro emocionado explicación. "¿Por qué no explicas a nosotros?"Bueno, permít
(Si te gusta este Instructable, no olvide votar en ella (por encima de: bandera de la esquina a la derecha). Rex, el Robot está compitiendo en robótica y sensores concursos. ¡Muchas gracias! ;-)Este Instructable fue desarrollado en mi último proyecto
== > Este proyecto obtuvo el 2 º premio en concurso de robótica de 2016.Muchas gracias por los votos ;-)El propósito de este proyecto es construir un Robot seguidor de línea con control PID. También utilizamos un dispositivo Android para configurar f
Este es mi primer instructables. Aquí estoy mostrando cómo hacer un dos ruedas arduino bluetooth robot barato, utilizando tubos de PVC y sus articulaciones (para hacer el cuerpo). Es sencillo de hacer y fácil de programar. Tienen un montón de diversi
Con los años, he construido varios grandes robots mediante un controlador de robótica por encargo que he creado llamado el sistema SmartRover. Este controlador fue inicialmente usada para mi robot SmartRover que construí que funcionó en una corriente
Compañero de cama es una cama de robot autónomo que busca nuevos contratos. En otras palabras, he robotizado mi cama personal para socializar y compartir de sí mismo con otros.Tal vez un poco más de una explicación está en orden. Un acompañante puede

")











