Paso 2: Utilizando el controlador de MOTOR L293D:-
L293D es un doble motor driver puente H circuito integrado (IC). Controladores de motor actúan como amplificadores de corriente ya que llevan un control de poca intensidad de señal y proporcionan una señal de corriente más alta. Esta señal de corriente más alta se utiliza para conducir los motores.
L293D contiene dos circuitos, driver puente H incorporados. En su modo común de la operación, dos motores de corriente continua pueden conducir al mismo tiempo, tanto en dirección hacia adelante y hacia atrás. Las operaciones de motor de dos motores pueden controlarse por entrada lógica en pins 2, 7, 10 y 15. Entrada lógica 00 o 11 detendrá el motor correspondiente. Lógica 01 y 10 gire en el sentido horario y antihorario respectivamente.
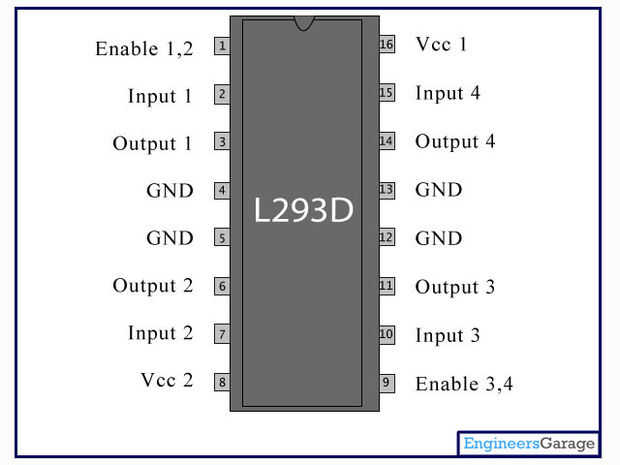
Activar los pines 1 y 9 (correspondiente a los dos motores) deben ser altos para motores empezar a operar. Cuando una entrada de enable es alta, es habilitado el controlador asociado. Como resultado, las salidas se convierten en activos y trabajo en fase con sus aportaciones. Asimismo, cuando la entrada enable es baja, que el conductor está deshabilitado, y sus salidas son y en el estado de alta impedancia. Diagrama de pines:
PIN Descripción:
No perno nombre de la función
1 pin enable para Motor 1; Active habilitar alta 1,2
2 entrada 1 entrada 1 Motor 1
3 salida 1 salida 1 Motor 1
Tierra 4 tierra (0V)
Tierra 5 (0V)
6 salida 2 salida 1 Motor 2
7 entrada 2 por 1 entrada de Motor
8 tensión de alimentación para motores; 9-12V (hasta 36V) Vcc 2
9 pin enable Motor 2; Active habilitar alta 3,4
10 entrada 1 entrada 1 Motor 3
11 salida 1 salida Motor 1 3
Tierra 12 (0V)
Tierra 13 (0V)
14 salida 2 salida Motor 1 4
15 entrada2 para Motor 1 entrada 4
16 tensión de alimentación; 1 Vcc de 5V (hasta 36V)

![Arduino robot de evita el obstáculo [fácil!!!!]](https://foto.askix.com/thumb/170x110/c/23/c235e7fbbad097254ba423c29bd1f4e0.jpg "Arduino robot de evita el obstáculo [fácil!!!!]")





")

")



