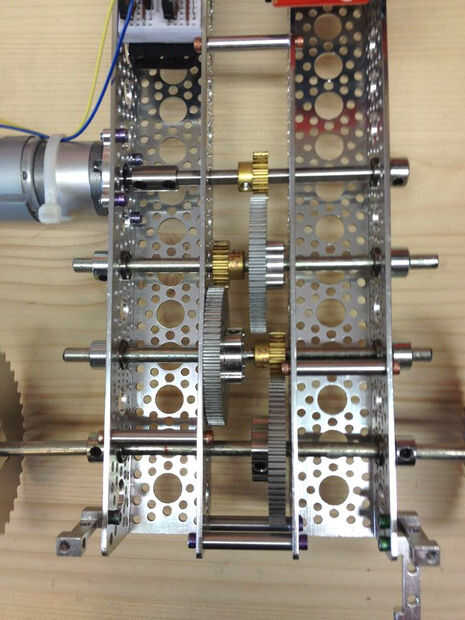
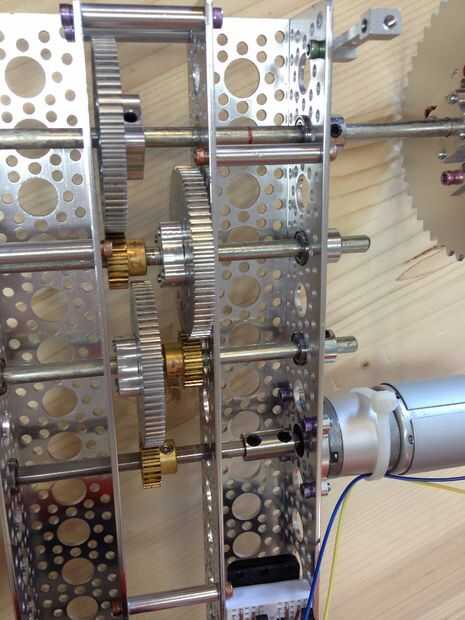
Paso 6: Todos a bordo del tren de engranajes




Engranajes:
He utilizado:
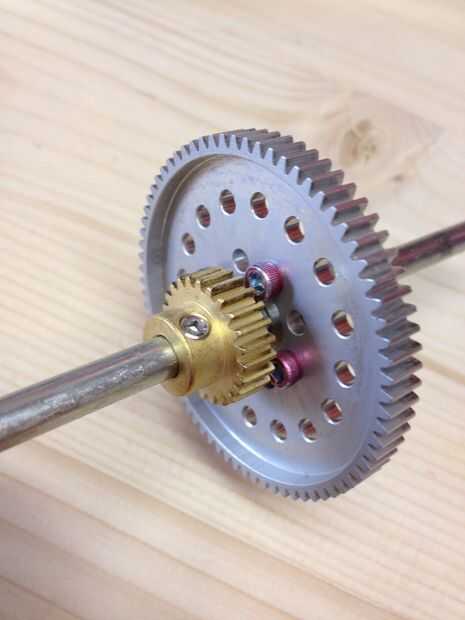
- tres 24 dientes, paso 32, 1/4 de pulgada alesaje engranajes de piñón
- tres 72 diente, paso 32, 1/2 pulgada diámetro engranajes de aluminio
Estos dos engranajes tienen una proporción de 3 a 1. Se configuran para reducir la velocidad y aumentar el esfuerzo de torsión por un factor de tres para cada una de las 3 etapas. La velocidad máxima resultante es aproximadamente 11,6 rpm. Esto surgió a través de algún ensayo y error; puede comenzar con una más orientada hacia abajo el motor para comenzar con.
Elija su eje:
He utilizado alguna precisión de acero de 1/4 pulg. D los ejes de la ciudad de Servo, pero también encontró que en un sujetador que puede recoger algunos 1/4 pulg "PLAT STL - redondo" de Mendards, he probado las varillas de aluminio de 1/4 de pulgada y las barras de acero soldable de 1/4 pulg pero eran ambos a sólo un poco demasiado densamente. Hay pros y contras al uso de la D del eje contra las barras de acero desde la ferretería; sobre todo la forma D es muy útil al usar ejes de tornillo - sin embargo la precisión de acero de 1/4 pulg. Ejes de D de la ciudad de Servo me pareció ser duro trabajar con desde el ajuste tan fuerte... era una lucha para conseguir algo o desactivar. Las barras de acero de la tienda de hardware eran siempre tan levemente más delgado y por lo tanto mucho más fácil trabajar con, pero puesto que no hay ningún lado plano Haz viciados hasta bastante malo de los tornillos que se encuentran bajo mucha fuerza.
Ejes que se necesita:
- 14 pulg del eje (x2)-uno para ahora para la parte delantera y posterior necesita el otro para la espalda. El más grande eje D ServoCity es de 12 pulg así que usted podría ir con el Menards varillas de acero o utiliza un acoplador de eje de 1/4 de pulgada - 1/4 pulg a dos 7 en. Ejes de D.
- eje de 6 pulgadas (x2)
- eje de 4,5 pulgadas (este es el que conecta con el acoplador de eje del motor)
Puntas de ejes:
- Si utilizas las barras de acero de Menards; después de cortar a bisel de longitud de los bordes (yo usé una dremel) para hacer poniendo piezas en más fácil. Me lo agradecerá más adelante. De hecho, ello a su precisión D eje así!
- Independientemente de qué ejes le uso mantener un pequeño archivo fino listo para archivo de los stos lugares... sobre todo si utiliza ejes de tornillo de fijación.
- Para los elementos pegados sobre el eje:
- el método más eficaz para el retiro es un vicio y el eje del martillo hacia abajo.
- También he encontrado que utilizando un par de Alicates comunes del resbalón (con una banda de caucho gruesa o poco de cuerda para reducir estropear) en combinación con un destornillador plano puede a menudo ser eficaz también. Esto es especialmente útil si no puedes o no quieres desarmar un conjunto para llegar a un engranaje atascado... o si hay niños durmiendo y debe trabajar tranquilamente.
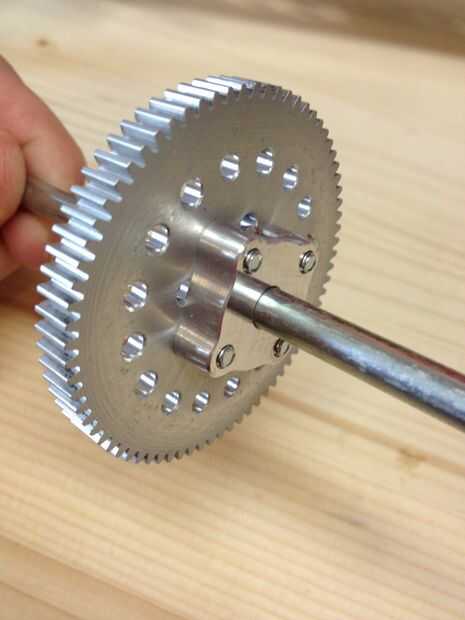
Elija sus ejes:
Terminé usando ejes de tornillo de ajuste para los engranajes y ejes para las ruedas. Si no usas D-eje el eje de sujeción será mucho más fácil de quitar y ajustar. Sin embargo puesto que la forma está diseñado reunir dos de los 4 tornillos como aprieta-no quería introducir cualquier posible distorsión o desviación para el tren de engranajes.
Otros:
Por supuesto necesitará algunos rodamientos de bolas de 1/4 pulg con bridas (535198), algunos collares de tornillo de 1/4 pulg.y algunos espaciadores de 1/4 de pulgada del eje así como ejes de tornillo de ajuste de los engranajes más grandes.













