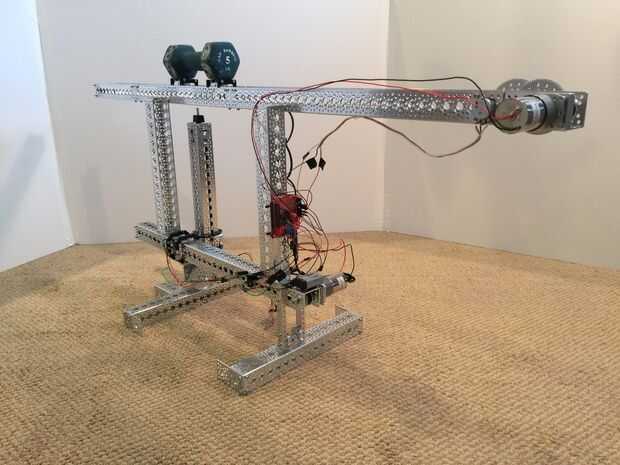
Este proyecto utiliza las partes de la Actobotics sistema de construcción para hacer un robot que sube escaleras. Los componentes principales del robot son el montaje de la pata delantera, pata trasera y los medios para que el cambio de peso entre las dos piernas. Deslizadores de canal Actobotics activar el robot subir y bajar cada pierna, paso cada pierna hacia adelante y equilibran a sí mismo que realiza estas acciones.
")



")








