Paso 8: Hacer las poleas de la torsión para mantener la cuerda tensa
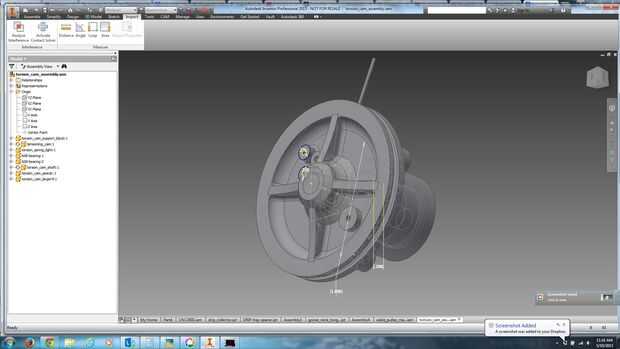
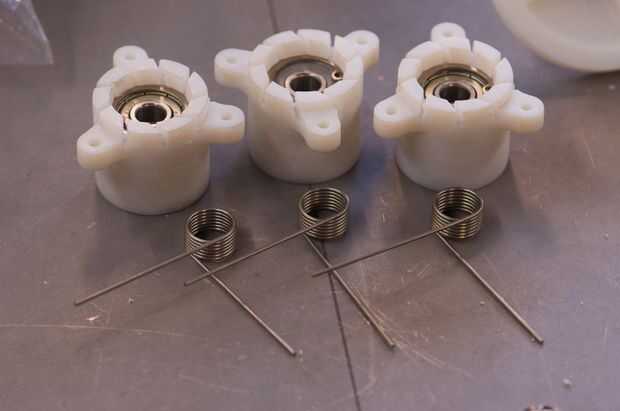






Realmente estaba disfrutando de la velocidad con la que podía diseñar y fabricar soportes de carga giratorias con rodamientos de skate, eje de 8mm y soportes de eje impreso 3D, como se ve en otra parte en este proyecto como los rodillos que soportan el anillo giratorio. Así que decidí evaluar un método más compacto de la tensión de los cables: el exceso en una polea que fue apretar un resorte de la bobina. Una polea se monta en un eje, que se encuentra en el centro de dos rodamientos de skate adyacentes. Un resorte de torsión se encuentra entre la polea y los cojinetes. Uno de los brazos de la primavera en la polea, el otro brazo está cautivo en el bloque de montaje. Canales redundantes permiten la posición en que la primavera viene a descansar para ajustarse en pasos.
Este método de liquidación las cuerdas de una polea es compacto, y con la constante elástica de derecha y el diámetro de la polea, cualquier tensión deseada se logra en la posición cerrada. Sin embargo, hay algunas desventajas que debo señalar así:
- Potencial de cable saliendo de la polea de. Dirigí esta agregando una dura parada (con sensor de interruptor de límite) para impedir que el diafragma abra demasiado, y hacer las ranuras de cable en el iris lo suficientemente profundo tener el grosor de cable entero sentado en la polea.
- Cambio de tensión en los cables de abierto/cerrado posiciones de iris. La fuerza del resorte es aproximadamente proporcional a la cantidad de giro de la polea (y por lo tanto cuánto del cable se toma) y rampas por encima de cero al máximo sobre el viaje de la primavera (en este caso, 3/4 vuelta). Esto significa que los cambios de tensión durante la apertura del diafragma. La tensión afecta la capacidad de absorción de cadenas: cadenas se exprima o absorber jugo adicional mientras que se hacen más tensos o flojos, respectivamente. Considera hacer una polea no redonda, o cam, de nivelar la tensión durante todo el ciclo, pero mantuvo a raya a ver cómo funcionarían las poleas uniforme en la práctica.
Estas poleas cuesta alrededor de $6 más resina impresión 3D, cada uno. Aquí está el desglose:
$4 para los dos cojinetes del patín de acero inoxidable, "608"
$1 por 2 pulgadas de eje de acero inoxidable de 8mm.
resina impresión 3D (o filamento)
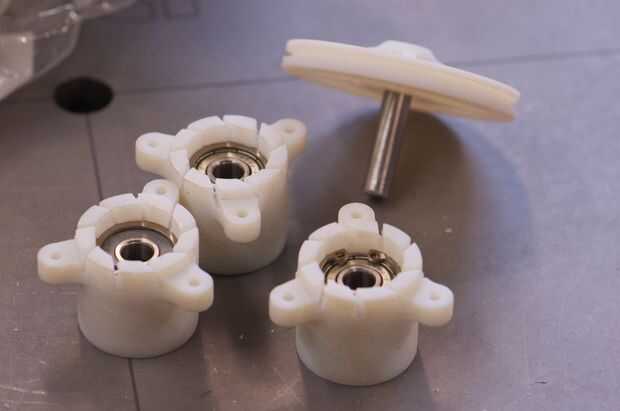
El procedimiento para hacer los bloques de rodamiento:
- diseño de polea y soporte CAD Inventor.
- Impresión 3D de vivienda / bloque
- limpiar la impresión 3D y escariar los agujeros de diámetro exacto
- eje para corregir la longitud de corte.
- hacer una ranura cerca de uno de los extremos del eje de pinza, utilizando la herramienta dremel y taladro de mano para girar el eje de sujeción.
- eje de epoxy a la polea, asegurándose de que ninguÌ n epóxido consigue en otros lugares sobre el eje
- Sujete el eje perpendicular a polea eje insertando rodamientos en el bloque de apoyo y manteniendo polea ras contra bloque (y por lo tanto perpendicular al eje).
- esperar para que epoxi secar.
- Retire el ensamblaje del eje de la polea, instale el resorte y luego retención de tornillos de polea, montar en bastidor.
- Instalar clip de sujeción en el extremo inferior del eje para evitar que













