Paso 5: Diseño de rodamientos de rodillos para el aro interior - evolución Radial del cojinete de apoyo




La rotación de anillos concéntricos domina la funcionalidad del diafragma, por lo que he elegido para el diseño de los soportes de cojinete para la rotación, primero. Ilustrado por encima están los rodamientos radiales, que mantienen los anillos coaxiales. ("Axial" teniendo asambleas restringir los anillos al ser coplanares).
Después de revisar varias opciones para apoyar el aro giratorio, colocó en el método barato y fuerte de la utilización de cojinetes de rueda de patín de acero inoxidable. Estos cojinetes, llamados "608" rodamientos, se pueden comprar por menos de $2 cada uno, en paquetes de 8 en Ebay. y son 7mm ancho, tiene un diámetro interno de 8mm y diámetro externo de 22mm.
Estos rodamientos encajan perfectamente en el eje de acero inoxidable de 8 mm, que se puede comprar por aproximadamente $7/ft desde mcmaster.com. El eje se puede cortar fácilmente con una sierra para metales o sierra de cinta.
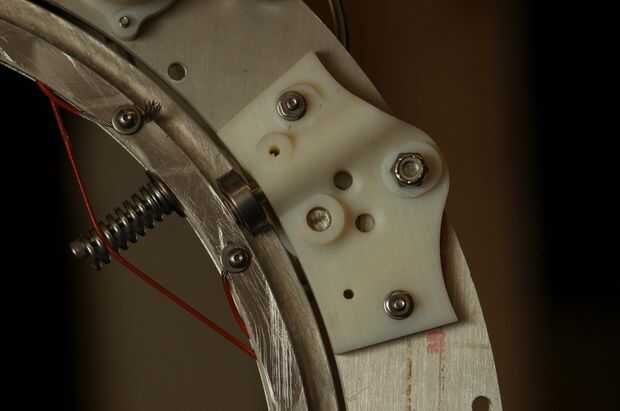
Para apoyar los ejes de rodamiento, 3D imprimí bloques de soporte para sostener el eje de 8mm. Éstos fueron impresos en Stratasys Objet Connex impresoras 3D que hacen piezas muy densa y fuertes con muy alta precisión, y la mayoría de las piezas mostradas aquí tomó menos de dos horas para imprimir. Después de la impresión, usé un escariador de 8mm para limpiar el agujero del agujero que el eje se inserta en, ya que descubrí que el plástico es frágil, y forzando el eje a través de lo contrario podría causar expansión que agrietaría la parte. Los rodamientos axiales que se muestran aquí tenían suficiente fricción después de la inserción que no sujeción eje adicional era necesaria para mantener en su lugar.
Después de diseñar el bloque de soporte de cojinete y los agujeros a través del cual se perno para el anillo de aluminio, solía capacidad del Inventor para editar piezas en una Asamblea y la función de "geometría del proyecto", para transferir el patrón de pernos del bloque de cojinete en el anillo de aluminio. También transfiere la forma de la parte alta del bloque del cojinete y hace un bolsillo en el anillo de aluminio de modo que las dos partes encajan perfectamente. El bolsillo cerca de 0.005" de mayor tamaño en todas las direcciones por lo que tendría un pequeño margen de maniobra, desde chorro de agua corte a menudo es ligeramente encima o debajo de tamaño.
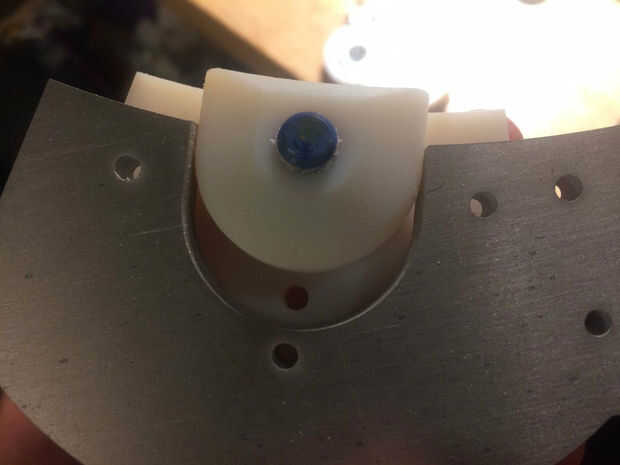
Prueba de cortar una pequeña porción del anillo y el patrón de perno de corte para el bloque del cojinete, para comprobar el ajuste (se muestra) ajustan como un guante. En posteriores iteraciones de diseño integrada los soportes del eje de rodamiento axial y radial de los rodillos en un único ensamblado de 3D impresión bloque del cojinete
- He añadido un peldaño grueso de 2mm de delrin para la superficie rodante de cada cojinete radial (un 26mm OD, ID 21,9 mm, 7mm ancho anillo de delrin) que se encajan sobre los cojinetes y
- reducir el ruido,
- proporcionar una superficie resbaladiza a prueba de fallos en caso de que el rodamiento agarrotado, y
- eléctricamente aislados de los cojinetes del acero inoxidable del anillo de aluminio, para eliminar la corrosión galvánica.
- Hice el rodamiento bloque en mitades que afianzado con abrazadera juntos alrededor del rodamiento, a ambos lados del anillo.













