Paso 1: Construir el cuerpo y el plan de corte de madera contrachapada
![]()
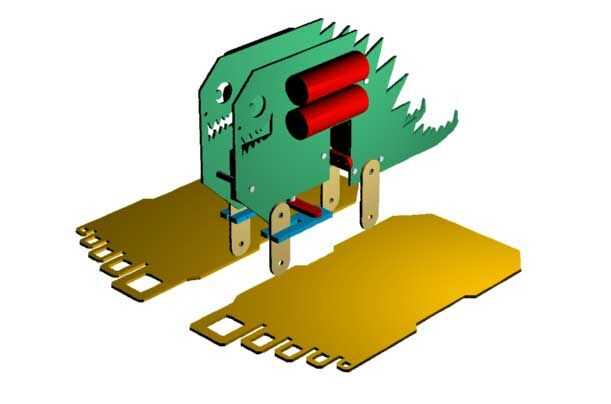
El Robotrex utiliza el principio a pie de "Bigfoot". Pero junto con la colocación de los servos a la forma del pie y el centro de gravedad, tiene algunas mejoras estructurales importantes que son el resultado de un cuidadoso estudio que tomó varios días de tiempo antes de la feria. Al igual que el Bigfoot, este robot también es accionado por dos servos. Pero con una gran diferencia en lugar del servo colocar esquema de la Bigfoot donde los servos estaban mirando hacia el exterior del cuerpo, (con enlaces también fuera) este robot tiene todo dentro del cuerpo. Las partes de transferencia de energía también se colocan entre las piernas, dentro del cuerpo casi totalmente ocultado. El servo de pies-arriba-abajo se coloca en la parte posterior, hacia el interior del cuerpo de robot donde solía sentarse en la parte delantera Bigfoot hacia adelante. El servo de pies-avance-recompensa se coloca en la parte inferior frontal, mirando hacia atrás en el cuerpo de robot donde solía sentarse en la parte posterior de la Bigfoot hacia abajo. Donde se transfiere el poder del servo pies-avance-recompensa a las piernas por medio de un alambre de hierro, en Robotrex, una pieza de madera contrachapada rígida se utiliza para el mismo propósito. Y esto concluye a un robot que se mueve más determinently con mayor equilibrio. Se transfiere el poder del servo pies-arriba-abajo no a la punta de los pies como en el Bigfoot pero a la parte media del pie dando como resultado un robot mucho más estable de pie. Por medio de las mejoras como este y un mucho mejor centro de gravedad, la potencia de los servos son transferidos a las piernas y tierra con más eficacia, dando por resultado menos pérdida de energía debido a la estructura. Esto también produce una mayor duración de batería. El robotrex puede funcionar durante horas con sus 4 pilas AA recargables.
 (impresión 3D)")












