Paso 28: Montaje de la cámara de Raspberry Pi
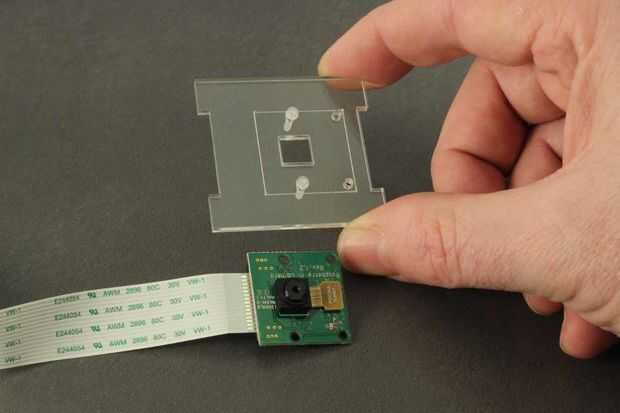



Si tienes una cámara de Raspberry Pi para agregar a su DiddyBorg, el titular de la cámara de plexiglás y añadir 2 de los tornillos de Nylon de M2x8mm a los dos orificios. Agregar también 2 de las arandelas de M2 en el interior del titular de la cámara.
Añadir la cámara frambuesa Pi a la montura de la cámara. Debe estar alineada con la caja de corte y los dos agujeros de la parte inferior. Sólo usaremos los dos agujeros del centro aquí.
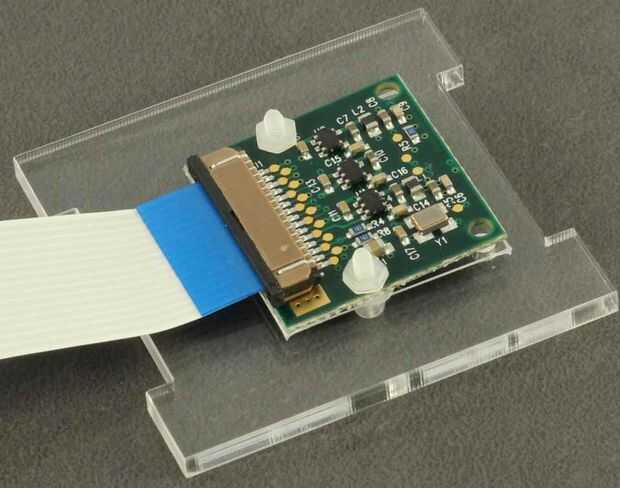
Coloque con cuidado las tuercas M2 en la parte posterior de la cámara. Apriete suavemente. La Junta no debe flex. Si lo hace, asegúrese de que tener las arandelas en el lado correcto.
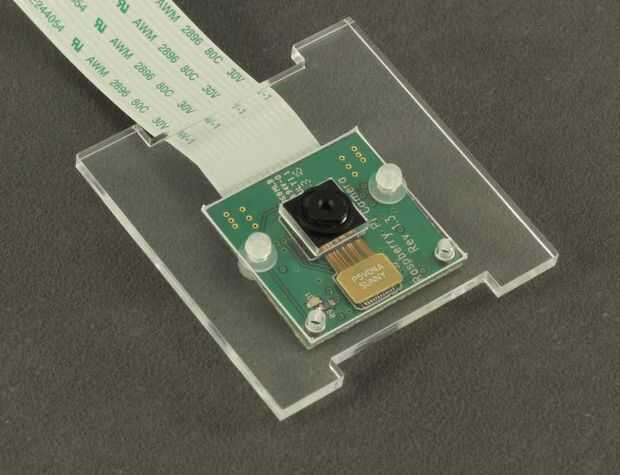
Coloque la cámara sobre su soporte en el metacrilato base con el lado del cable apuntando hacia arriba. Enchufe el cable de la cámara en el Pi de frambuesa siguiendo las instrucciones de fundaciones de Raspberry Pi.
Nota no debe ser difícil para el montaje de la cámara de plexiglás en la base de la ranura. Si es así, revise cuidadosamente la alineación. El módulo de la cámara debe ser un calce para minimizar las vibraciones, pero si no van a quedar en los orificios de montaje, eliminando los bordes de la plexiglás ayudará. Usted puede hacer esto con fino papel de lija mojado y seco de la arena ~ 600. Debe requerir sólo una pequeña cantidad de lijado. Retire el módulo de cámara antes de lijar!
También, si no tienes una cámara de frambuesa Pi puede elegir si desea instalar al soporte de la cámara de plexiglás o no.













