Paso 1: Pins/alimentación de Control

Ambos MegaMotos utilice una serie de pines de puente para seleccionar que pines del Arduino utiliza para comunicarse con él. Esto da una gran cantidad de flexibilidad para controlar MegaMotos múltiples a la vez, o interfaz la MegaMoto con otros escudos. A continuación es una explicación de cada uno de los puentes.
Activar pines:
El pin enable es qué pin "enciende" la Junta, lo que le permite controlar el motor. Si la Junta está desactivada, el motor se detendrá y no se puede controlar. Si selecciona D8, D12 y D13, la Junta se habilitará cuando escribes los pines digitales alta 8.12 o 13. Si usted elige 5V, luego la Junta se habilitará como tiene poder (siempre que esté conectado a Arduino).
PWMA/B:
Estos pines se utilizan para mover el motor. PWMA/B de control de extensión/retracción, dependiendo de cómo conectar el actuador a la A / terminales B. La velocidad del motor puede controlarse usando analogWrite en el perno correspondiente para crear una señal PWM. Velocidades pueden ser entre 0 y 255, dando el motor 0-100% del voltaje de la fuente de alimentación (0-12V).
Sensor:
Los pernos del sensor tienen 2 puentes. El uno puente (vertical), conexión A2/A3 se utiliza para unir los sensores actuales de ambas mitades del puente H. Cada lado del puente H tiene un transistor, que se lee la corriente de. Si está usando la MegaMoto para controlar 1 actuador bidireccional, entonces habrá la misma corriente fluyendo a través de dos transistores. Si dejas el puente conectado, ambos sensores de corriente será en paralelo, que le da la mitad de lo que la lectura actual es. Si se desconecta el jumper, la lectura actual será la carga total. Para alta corriente (10A +) aplicaciones, se recomienda mantener el puente conectado para evitar demasiado actual de ir a través de los sensores, extender sus vidas.
La fórmula de lectura actual es: 0.075V por amperio de corriente para el MegaMoto Plus y 0.051V por amperio de corriente para el GT. MegaMoto
Ej: Si usas una MegaMoto Plus y el motor está tirando de 20 amperios y el puente está desconectado, el pin actual de la regeneración será en 20 * 0. 075 = 1,5 voltios, lo que dará una lectura de ~ 300 al usar la función analogRead(). Si el puente está conectado, la lectura será 0,75 voltios, o ~ 150 por analogRead().
El segundo puente (horizontal) elige que pin analógico que el Arduino va a leer los comentarios de.
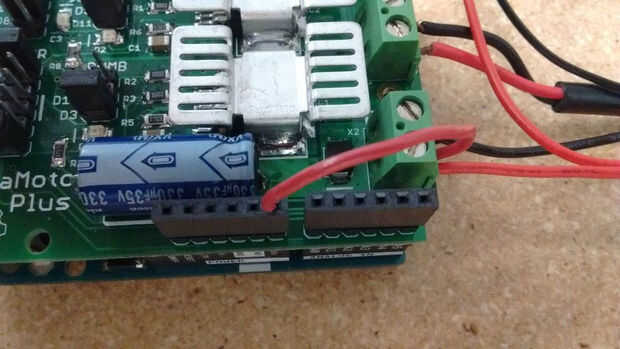
Si utilizas una 12V (o menos) fuente de alimentación al poder la MegaMoto, puede utilizar esa misma fuente para alimentar el Arduino. Sólo tiene que conectar un alambre pequeño de BAT + al pin de Vin. Ver la segunda foto.













