Paso 2: Determinar el pinout motor
Con muchos alambres allí es variación tanto en conectar todo puede rápidamente frustrarse tabla flip. Pinout es relativamente fácil de determinar para el motor bipolar de 4 pines, no es tanto así para el perno 8. Pero no se asuste por nuevo alambre barba de ancho del motor, es todo solucionable por cada herramienta residente de tienda electrónica – osciloscopio. (Si no tienes uno, haz uno.)
En primer lugar, se debe determinar los extremos de la bobina. En la figura 8 hay 4 bobinas con los pernos de 2 colas, cada darle 4 * 2 = 8, duh. Tome el multímetro y cambiar al modo de medición de la resistencia. La lógica es simple: los cables que no pertenecen a la misma bobina le no daría ninguna conexión mientras que los alambres que son colas de la misma bobina mostrará cierta resistencia baja (~ 70 ohmios en mi caso). Hacer una lista: A B C D para bobinas y número par de pines. Así:
A = 1 7
B = 4 2
C = 3 6
D = 8 5
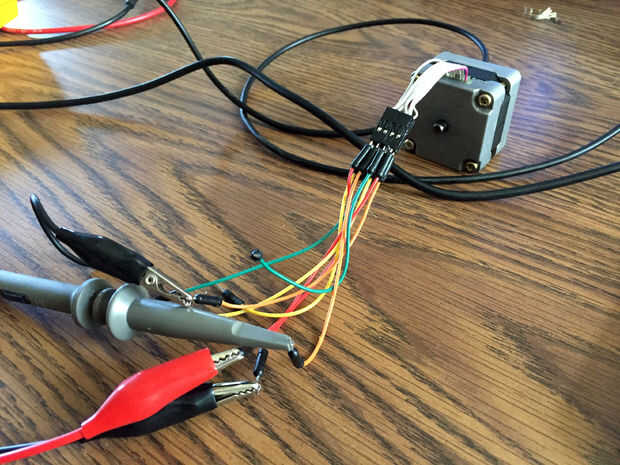
Entonces, tenemos que determinar la ubicación de cada bobina dentro del motor. Sé que sólo podríamos abrirlo y tomar un looksie, pero se trata de: a) no diversión, b) los cables son de pelo fino y el mismo aspecto y c) que ya he encendido un osciloscopio aquí. Enchufe de 1 canal del alcance de un par al azar en polaridad al azar. Conecte el canal 2 a otro par al azar en la otra polaridad al azar. Y ahora, el motor de un leve giro en cualquier dirección. Como me dijo una señora gorda en mi clase de física de 6 º grado, hace girar un imán permanente cerca de un conductor genera una corriente en este conductor, esto es exactamente lo que vamos a ver en el ámbito de aplicación: dos patrones ondulados.
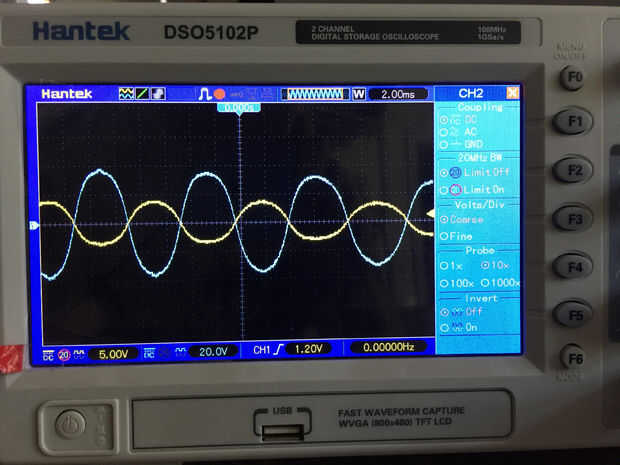
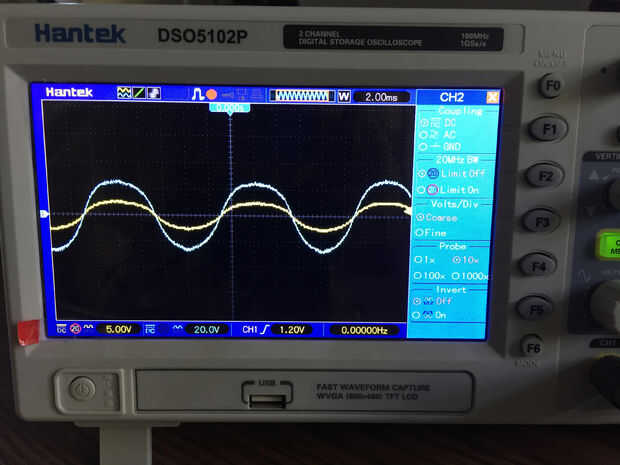
Hay tres opciones de lo que vas a ver:
- Dos líneas será sincronizado que esto esencialmente significa que has encontrado enfrente de bobinas que se sientan cara a cara, pero tienes la polaridad de uno de ellos hacia atrás.
- Dos líneas están batiendo en el exacto enfrente de direcciones esto es lo mismo, pero esta vez has calculado la derecha de la polaridad.
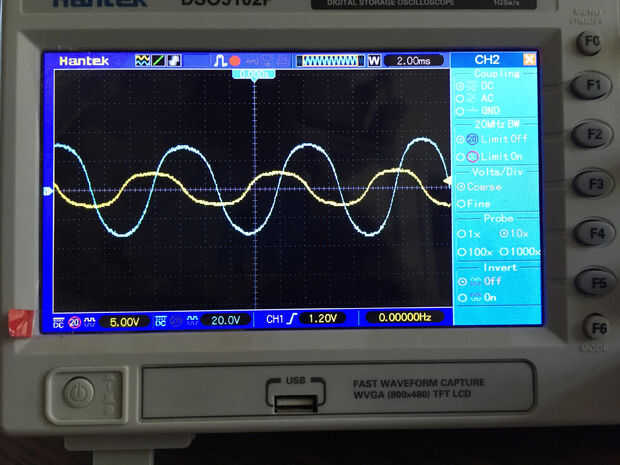
- Las líneas están ligeramente fuera de sincronía que esto significa bobinas que están sondeando sentarse 90 grados uno del otro.
Si, digamos, pone sonda de ch1 en A bobina y ch2 sobre bobina D para obtener dicha imagen, significaría las bobinas se encuentran así en un motor:
No importa si se trata de un cuadro exacto de cómo bobinas se encuentran en el motor desde el lado superior hacia abajo – como todas las posiciones relativas se determinan motor hará girar.
Ahora, después de que ha situado cada bobina del motor en relación con cada uno otro, es tiempo para averiguar la polaridad de las bobinas. Una vez más, como con posiciones – todo es relativo así que no importa si tienes el motor completo hacia atrás, siempre y cuando se cumplan todas las restricciones de la polaridad relativa del motor será chooch bien. Dicho esto, coge una bobina al azar y absolutamente arbitrariamente llame a uno de sus extremos una + y otra. Marcarlos en la tabla del pinout:
1 = A +
7 = A -
Ahora, poner un canal 1 del ámbito en en la polaridad que solo has guesstimated y el canal 2 a la bobina que se encuentra en el lado opuesto del motor contra él en polaridad arbitraria. Haga girar el motor hacia la derecha ligeramente. Es importante hacer girar el motor solamente en una dirección a no eludir las condiciones de prueba. Si ver gráfico absolutamente síncrono en el ámbito de aplicación, que conectado a la bobina 2 en la misma polaridad, lo que significa su alcance si está conectado a es la polaridad correcta. Si dos gráficos que está viendo son totalmente opuestos: su polaridad en el canal de alcance 2 es al revés (no malo). Ahora, usted puede poner la polaridad de la bobina del segundo en la tabla:
5 = D
8 = D +
Ahora, es necesario determinar la ubicación relativa de las bobinas de lado. Es decir, la bobina C la izquierda o a la derecha a la bobina D en mi ejemplo.
Determinarlo que es muy fácil: Si pones un canal de alcance 1 en bobina A con respecto a la polaridad que haya determinado y canal 2 en bobina C en una polaridad arbitraria usted verá un gráfico #3 de los cuadros: dos gráficos son 90 grados fuera de sincronización. Y aquí está la parte difícil: Si el gráfico de canal 2 (uno con polaridad arbitraria) viene antes del canal 2 y ya tienes la polaridad correcta. Si no lo tienes al revés (de nuevo, no algo malo).
Ahora pones a la tabla del pinout y ya está completo!
1 -.
2 B +
3 -.
4 -.
5 -.
6C +
7 A +
8 D +
Tenga en cuenta que aunque mi motor pinout es este, no significa que ustedes deben ser tales. De hecho, cualquiera que esté familiarizado con mi nivel de conocimientos soldadura diría mi PIN es extraño (y probablemente aconsejaría a no confiar en cualquiera de mis instructables, demasiado).







")





![Controlar motores de paso a paso Bipolar con Arduino [sin biblioteca]](https://foto.askix.com/thumb/170x110/5/87/587864a8efe29028e8562de52b3ccc03.jpg "Controlar motores de paso a paso Bipolar con Arduino [sin biblioteca]")