Paso 3: Demo Motor Servo, LED y cabeza del engranaje
![]()
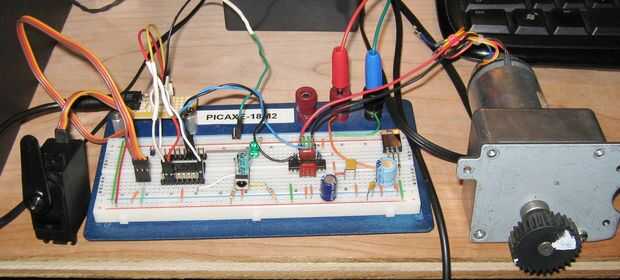
Para demostrar las capacidades de este circuito, me enganchado a un servo, el LED y el motor de cabezal engranado a la protoboard. El chip PICAXE tiene 2 generadores PWM, disponibles en los puertos B.3 y B.6 (elegí B.3). La entrada de señal del servo se conecta a este puerto a través de una resistencia de 330 ohm. El LED fue atado con alambre para ser conducida por el puerto B.4 (alto para el). Para impulsar el motor de la cabeza del engranaje, el chip de controlador cuádruple puente H tuvo que ser utilizada debido a la demanda actual. También tiene la característica de ser capaz de revertir la polaridad (y dirección) del motor a través de 2 líneas de la lógica del PIC (B.6 y B.7). Si uno es alto y otro bajo, conseguimos CW, una baja y otra alta, CCW, ambos bajo, el motor se detiene.






")






