Paso 5: Interpretación de datos
Contamos con tres diferentes valores, Sensor de la izquierda, derecho Sensor y Sensor de diferencia.
Nuestro robot tendrá la capacidad para seguir adelante, a la izquierda, o derecha basadas en estos datos. Vamos a romper:
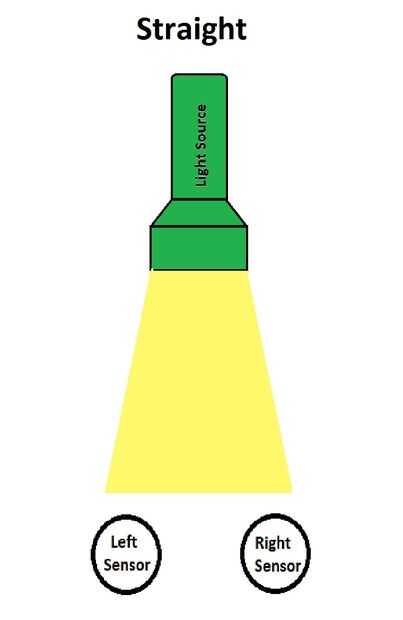
Si la diferencia de los sensores de la izquierda y el sensor derecho está bajo un cierto umbral, seguir recto. Este valor de umbral será personalizable. Para esto vamos a añadir este código dentro del bucle vacío del código de implementación de LDR, después de que el código ha divulgado los valores de los sensores.
Si (SensorDifference < = 75) {}
Siga recto
}
Vamos a añadir la función motora para ir recto en el siguiente paso. Este paso es puramente para el algoritmo. Esto también se aplica a las siguientes dos secciones para ir a derecha e izquierda.
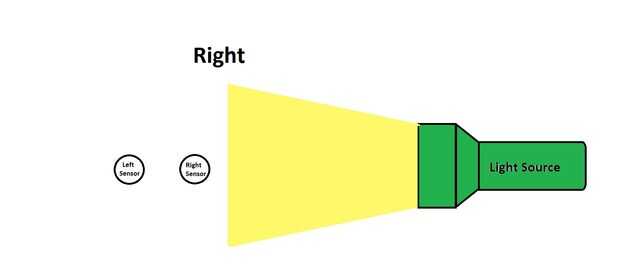
Si el sensor derecho más luz que la izquierda, gire a la derecha. Tenga en cuenta que mientras que un sensor Lee más que el otro sensor, que todavía sean muy cerca uno del otro. En este caso se ejecutarán ambas funciones. Para resolver este problema, podemos utilizar una instrucción if else en lugar de otro. Esto sólo se ejecutará sólo si cualquiera si declaraciones antes de esta declaración es no ejecutado.
else if (RightSensor > sensor izquierdo) {}
Gire a la derecha
}
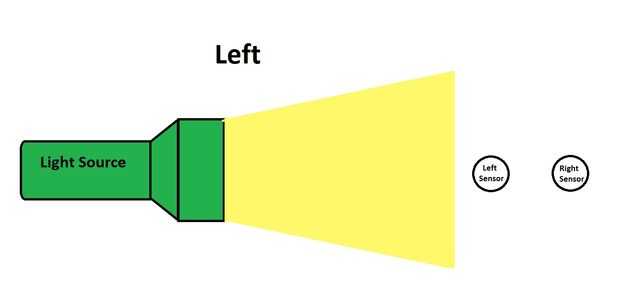
Semejantemente para el comando izquierdo
else if (LeftSensor > RightSensor) {}
Gire a la izquierda
}
En cada uno de estos tres comandos, vamos a añadir el control real del motor, que se realizará por escrito ya sea alto o bajo a los pines digitales 2 y 3. También agregamos una línea de depuración que indicará a qué dirección quiere que el robot para moverse. Esto es útil para determinar si el código está funcionando correctamente, sin tener un monstruo robot hacia fuera y posiblemente fractura sí mismo en caso de que el código no está funcionando correctamente. Te recomiendo ejecutar el código en su robot sin el motor conectado y controlando el Serial Monitor para comprobar si las cosas funcionan correctamente. Si lo están, se puede proceder a ejecutar el código con los motores.



 con Video Stream en vivo!!")





 también controlado por voz")


