Brazo robótico con el transportador, capaces de trabajos de montaje de piezas en curso (3 / 9 paso)
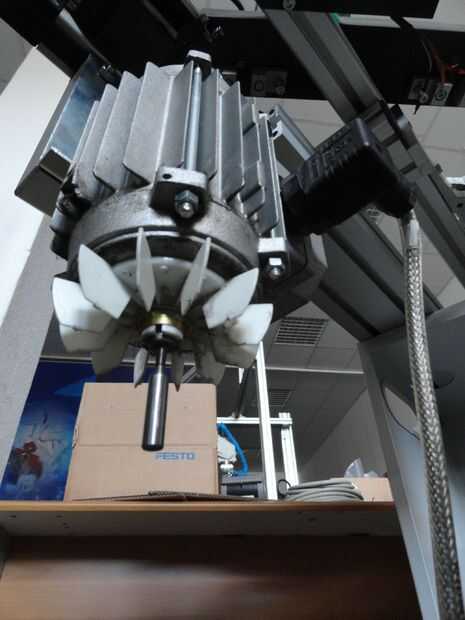
Paso 3: Conectar el codificador
Para poder determinar la velocidad del motor (y por lo tanto, la velocidad de la cinta) me volví una extensión de eje a la parte inferior del motor. También el eje del motor era necesario ser "hilo aburrido" (perdón por mi inglés) poder furl la extensión en el eje del motor. En el otro extremo de la extensión vino el Megatron (MHL40 8 1000 5 NA BZ) codificador incremental. Las partes principales del codificador son: fuente de luz (en mi caso es un LED), que brilla a través de un disco con agujeros. En el otro lado de este disco hay un sensor de luz que cuenta los impulsos de luz entrantes y transmite esta señal al procesador principal del robot. Hay un "primer calibrado" necesitado, para sincronizar el sistema de coordenadas del robot con el desplazamiento de la cinta transportadora, y la gira del codificador durante esta distancia. Después de esta calibración del robot calcula las señales del codificador a distancias en su sistema de coordenadas. Una tarea más difícil y desperdiciador de tiempo (después de la reconstrucción de la parte mecánica de la cinta) fue hacer los ajustes correctos para esta sincronización. Era necesario escribir un programa que se encarga de los variadores de frecuencia para poner en marcha el transportador, y abrir-cerrar los tapones neumáticos y por supuesto era necesario para mover los brazos robóticos en las posiciones adecuadas y conocidas. Las principales líneas de este código de sincronización están disponibles en el manual pdf del robot (Mitsubishi RV-3SDB). También el diagrama de escalera y completo código disponible aquí con mi configuración.
Rápidamente los robots son cada vez más integrado en nuestras vidas día a día. Limpiar nuestros suelos, nuestro café y se utilizan incluso para telepresencia. Ya que se están convirtiendo en tan vitales para la sociedad, ¿por qué no regalar a nuestro
Esta es una guía para hacer un control remoto robótica brazo (6DOF) o simplemente para controlar algunos servos en algo.Puede usar un TV normal de IR remoto para controlar los servos en un brazo robótico mecánico. hay 17 botones del mando a distancia
Resumen:Este proyecto trata sobre la creación de un brazo robótico de eje 3 puntos usando motores bipolares, con el brazo siendo controlado por un antiguo controlador de PlayStation2. Además hemos implementado un sensor conectado como ventilador pequ
Este uso del brazo robótico para Arduino con acelerómetro ADXL 345.Paso 1: materialesmateriales:dos arduino (no importa modelo)dos adxl345 triaxis acelerómetrocinco servos 9grpaneles de plexiglás (dos zonas de papel A4)batería lipoPaso 2: Construcció
Se trata de un brazo robot de 5 ejes, que hice con Arduino y la impresora 3D.Puede seguir pasos de abajo para descargar el recurso y hacerlo.Preparación de material:1.MG995 servo x 52. SONY Joystick x13. Arduino x1.Paso 1: Ver la película de demostra
Yo he sido la construcción de escultura durante más de diez años y he observado la evolución de la tecnología de mecanizado ir de fresado CNC a impresión de objeto 3D de escritorio. Estas 'Máquinas de hacer' han formado un espacio físico entre mis ma
A construir un brazo robot con piezas de Makeblock, lo anterior es el aspecto acabado y el video de trabajo.Paso 1: Lista de materialesLista de piezas mecánicas:Beam0808-136 x 3Beam0808-184 x 11Beam0824-016 V2.1 x 2Beam0824-032 V2.1 x 3Beam0824-096 V
Este es un proyecto simple que usted puede hacer por sí mismo y no requiere de partes costosas.Paso 1: Las piezas requeridas1) Arduino Nano2) escudo Nano3) cuatro potenciómetros4) cuatro Servos5) fuente de alimentación de 12 voltios6) protoboard7) ju
brazo robótico en las estadísticasUn brazo mecánico es robótica, generalmente programable, con funciones similares a un brazo humano. Los enlaces de un manipulador de tal están conectados por uniones permitiendo el movimiento de rotación (tal como en
Actualización: añadido esquema, parte superior capa PCB, fondo capa PCB y ambos arriba, imágenes de PCB inferiorAl terminar el "RevIO" - un clon de Arduino que tiene la diferente manera de exponer el uso de pernos. Decidí ir más lejos el próximo
Me jubilé hace poco y una de las cosas que me prometí fue que cuando me retiro que iba a completar todos los proyectos que tenía corriendo dentro de mi cabeza desde que era adolescente. Es cerca de 50 años o tan de los proyectos. En aquellos días no
Hoy, tenemos casi 2 técnicas para jugar con el brazo robótico, ya sea por los botones por ejemplo como en el escudo de juego o el uso de guantes que incluyan sensores. Sin embargo, hoy voy a mostrarles una nueva técnica usando solamente su teléfono A
El objetivo de este proyecto era construir un brazo robótico simple que puede ser controlado remotamente. Este brazo robótico se unirá a mi robot móvil. Además, este diseño ha sido equipado con una pantalla OLED que ofrece información sobre el contro





")



")






