Paso 4: Hardware



Ahora que usted ha hecho que los controladores de trabajar, vamos a montar nuestro brazo robótico, paso a paso:
1. hacer una base en el cual se monta el brazo entero. La mía es una base de madera 20 x 30 cm.
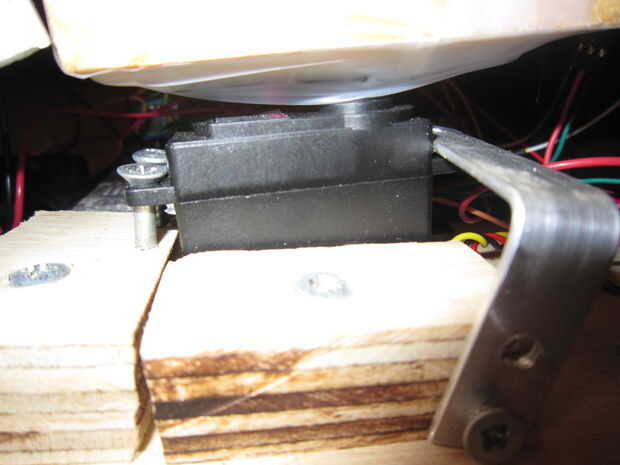
2. Haga un pequeño bloque de cobe. Usamos esto para celebrar el primer servo de la base. El mío es un madera 5 x 4 x 4 bloque cm y mi primer servo está atornillada a ella. Después de que ha hecho del bloque, debe atornillar a la base donde quieras tu servo que.
Asegúrese de dejar suficiente espacio para la Arduino. Tienes que poner el bloque cerca de los bordes para que el resto del espacio está reservado para el circuito.
3. Atornillar el servo a él. El servo se debe poner en la base, justo al lado del bloque y luego atornillado al bloque.
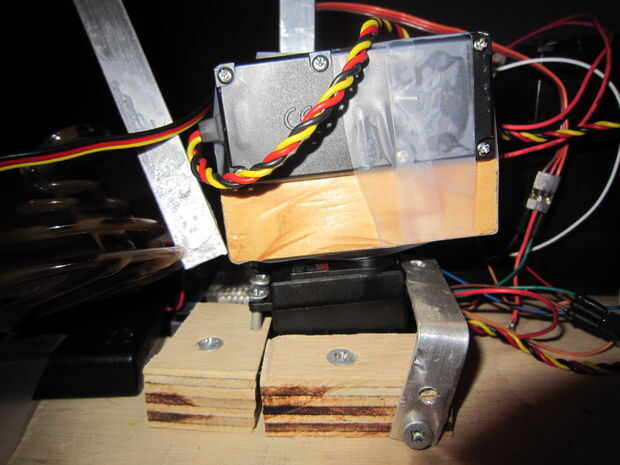
4. hacer otro bloque. Usamos éste para montar el servo de segunda. Hacer el bloque y Monte en el primer servo.
5. montar el servo de segunda en el bloque (una gigante). Usted puede hacer esto de muchas maneras: construir un contenedor de algún tipo, atornillar el bloque de alguna manera, etc..
¿Qué hago? Yo solo lo había grabado!
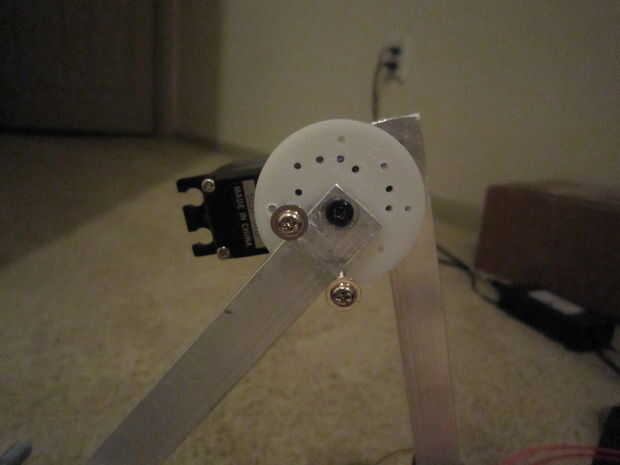
6. hacer el primer brazo! La mía es un pedazo largo de 17cm de aluminio con un agujero en un extremo y dos agujeros en el otro extremo. Necesitarás al menos 2 tornillos para montar el brazo en el servo. Acabar con un agujero en el servo y montar según la imagen.
7. montar el servo 3 º en el extremo del brazo (el extremo con 2 agujeros). Usted necesitará atornillarlo. Debería ser bastante sencillo y puse imágenes así.
8. montar el brazo 2 º en el 3 º servo. Que vas a hacer este exactamente como usted lo hizo para el primer brazo y el servo de segundos (un agujero en un extremo excepto que esta vez necesitarás 2 orificios en el if medio del brazo. Estos agujeros son necesarios para la garra estática del brazo. Te montamos el brazo estático más adelante.
9. montar el servo 4 º en el extremo del brazo 2 (el final con 2 agujeros). Sólo estamos construyendo nuevas armas que flexibilizarán el brazo del robot. Estamos utilizando el mínimo de brazos sin embargo.
10. Monte la garra móvil en el servo del pasado. Usé un brazo extra que tiene la garra (el robot tendrá más alcance esta manera). Mis garras eran pinzas de pelo! Compré un par de ellas y separar aparte y cada mitad como parte de la garra. Después de dividirlas, usted tiene que hacer un corte leve en la parte posterior de la misma para que usted puede pegar del brazo. En este paso sólo está pegado a uno de ellos.
11. hacer la garra estática. Esta es la sección más difícil del entre todo el hardware, porque tienes que ser exacto y asegúrese de que esta garra coincide con la otra garra. Lo mismo aquí: montamos un brazo de aluminio y luego montamos la garra en ella. orden para fijar un brazo estático en el brazo 2, creaste 2 agujeros. Fue idea de mi maestra para utilizar una estructura en forma de triángulo para mantener estática la otra garra. Echa un vistazo a la imagen: utilizamos 2 brazos pequeños para crear el triángulo. Es confuso saber, pero tratar de crear exactamente como en la foto. Es aceptable si no coinciden en el principio: usted puede doblar el brazo para que las garras se juntan, pero ser conscientes de la altura: demasiado altura impide que el brazo de llegar al suelo y un brazo corto no puede llegar a posiciones cerca del brazo. Después de hecho seguro que el brazo se fija, puede montar la garra haciendo un trozo y luego utilizando el pegamento para pegar en el brazo.
12. Ponga el Arduino + Bluetooth protector + el protoboard las baterías en la base así. Debería utilizar las baterías por lo menos 4: 1 para arduino y 3 para servos (1 de los servos se alimenta por Arduino.) Hacer el cableado: rojo los cables de servos ir a + V (baterías + Arduino 5V), negro alambres de ir a tierra (GND), y amarillos van a pines digitales del Arduino (pernos 8.9.10.11, para servos (base) de 1, 2(Giant), 3(elbow) y 4 (garra), respectivamente, si estás usando mi código). Cada servo se enciende por un conjunto de baterías, así que sí, que va a terminar por tener 4 grupos de baterías en su base de! Recuerde que el servo gigante debe estar alimentado para arriba por una batería del RC con + 5A actual o bien que no puede levantar todo el asunto. Yo lo sé desde que usé alcalina primero y luego lo aprendí la manera dura...
13. Asegúrese que las pilas se encienden y todo funciona bien. El circuito debe ser completado ahora! Pruebe a conectarlo a la pantalla Bluetooth según el instrcutions en la sección software y ver si puede enviar ningún comando. Envía algunos comandos como "1:30" que se moverá el servo de la base a la posición de 30 grados, o "2:78" que se moverá el segundo servo a la posición 78 grados.









")



