Paso 3: El temporizador 555 IC y sus modos de operación
El temporizador 555 IC es un circuito de sincronización monolítico que produce retrasos en sincronización exacta y las oscilaciones en forma de una señal de onda cuadrada. Este IC pequeña tiene un montón de aplicaciones tales como osciladores, tacómetros, generadores de forma de onda, etc. los sistemas de control.
Algunas características del 555 temporizador ICs son:
-Se opera desde una amplia gama de fuentes de alimentación de + 5 voltios a 18 voltios de tensión.
-Hundimiento o abastecimiento de 200 mA de corriente de carga.
-Los componentes externos deben seleccionarse adecuadamente para que los intervalos de tiempo se pueden hacer en unos minutos junto con las frecuencias superiores a varios cientos de kilo hertz.
-La salida de un temporizador 555 puede conducir a una lógica del transistor-transistor (TTL) debido a su alta corriente de salida.
-Tiene una estabilidad de temperatura de 50 partes por millón (ppm) por cambio de grados Celsius de temperatura, o equivalente a 0.005% / ° C.
-El ciclo de trabajo del temporizador es ajustable.
En este paso, no voy a hablar acerca de cómo realmente funciona la estructura interna (sólo consulte los enlaces de abajo especialmente las hojas de datos). Sólo puede pensar de él como una caja negra con 8 pernos y con la ayuda de componentes externos, como resistencias y condensadores, uno puede producir oscilaciones o retrasos de tiempo depende de los valores de los componentes conectados externamente.
Ahora permite habla de los dos modos de funcionamiento del Temporizador 555 y su configuración de circuito básico basado en la hoja de datos.
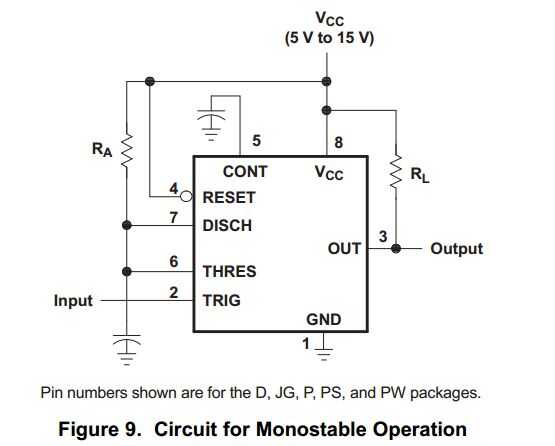
Monoestable:
Para un monoestable, el programador crea un retardo de tiempo cambiando su salida alta para toda la duración de la demora. Este retraso es accionada por una entrada externa al Pin 2 del IC. Cuando la clavija de entrada baja, comienza el retardo de tiempo. La duración de la demora depende de los valores de la resistencia externa y el condensador y se calcula mediante la fórmula:
tdemora = 1.1RC
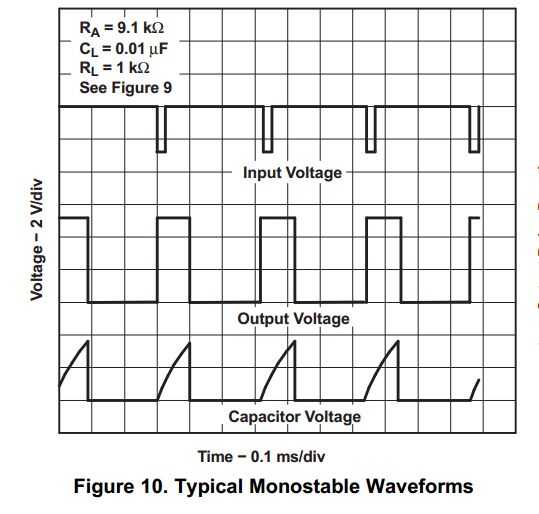
Si la señal de entrada es periódica, la salida también es periódica con la misma frecuencia. Si la señal de entrada va de bajo para cada 1 segundo, el retraso de tiempo de salida es reactivado cada 1 segundo.
Supongamos que la entrada bajo dura 1 segundo, pero su retraso de sincronización dura sólo para 0.5seconds. En el tiempo t = 0, vamos a decir que la entrada empieza conmutación baja y comienza a la salida de conmutación alta y después de un retardo de tiempo de 0,5 segundos, la salida debe cambiar a la baja al final del retardo de la señal. En este punto sin embargo (t = 0.5), la entrada todavía está en estado bajo. Esto puede causar la salida al instante cambiar otra vez a alta reactivando el retraso y este escenario debe evitarse mediante el establecimiento de la duración de la baja de la entrada a un valor relativamente menor en comparación con la duración de la demora de tiempo. En otras palabras, uno puede aumentar el ciclo de trabajo de la entrada para disminuir la duración de su estado bajo (aumento del tiempo en estado alto).
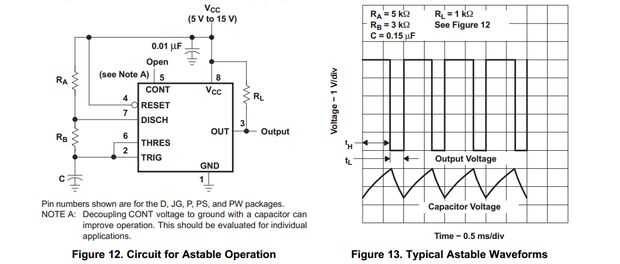
Modo astable:
Las funciones de modo astable como un oscilador que salidas una onda cuadrada con frecuencia, resistente y ancho de pulso del ciclo depende de los valores de las resistencias externas y el condensador. Esta oscilación se vaya para siempre a menos que... Si se corta la alimentación por supuesto. El ancho de pulso, ciclo de trabajo y la frecuencia se puede calcular como sigue:
pulso (t alta) = 0,693 (Ra + Rb) C
t baja = 0,693 (Rb) C
período = 0,693 (Ra + 2Rb) C
frecuencia = 1 / periodo
ciclo de trabajo = [t alta / periodo] x 100%
Dada esta fórmulas, podemos ver que al cambiar el valor de un componente daría lugar a un conjunto diferente de valores para el ciclo de pulso ancho, frecuencia y el deber de la señal. No sólo nos estamos variando el ancho de pulso pero la frecuencia así como variando el valor de Rb o ra.
La configuración básica de modo el monoestable y astable se muestra en las imágenes de arriba de la hoja de datos de la NE555(Texas Instruments)
Referencias:
[1] capítulo 6, manual de electrónica práctica 6ª Ed. por Ian Sinclair y John Dunton
[2] hoja de datos del LM555: http://www.ti.com/lit/ds/symlink/lm555.pdf
[3] hoja de datos del NE555: http://www.ti.com/lit/ds/symlink/ne555.pdf
[4] http://www.555-timer-circuits.com/
[5] http://www.electronics-tutorials.ws/waveforms/555...








 con optoacoplador y Encoder de disco")
")


")