Paso 3: El algoritmo:: parte 1
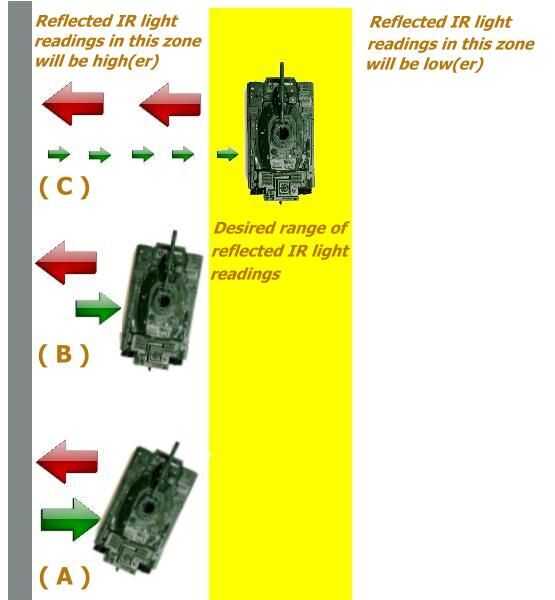
Básicamente, el Sensor de infrarrojos compuesto envía una ráfaga de luz IR y lee la reflexión. En la figura anterior, las flechas rojas representan IR se envía desde el sensor de luz, y las flechas verdes representan la luz reflejada. Cuanto más lejos de la pared que es, menos luz reflejan que se recibe.
- Situación A :: si es * mucho más que * cantidad de luz reflejada, que debe significar que es * muy cerca * a la pared, por lo que usted debe inactivo nuevamente el camino correcto un poco para que te mueves rápidamente lejos de la pared.
- B situación :: Si está consiguiendo una mayor que la cantidad de luz reflejada, lo que significa que usted está más cerca de la pared que debe tener, por lo que usted debe ocioso volver el buen camino un poco a virar lejos de la pared.
- C situación :: Si está obteniendo la "cantidad" de luz reflejada, que significa que está "en la zona", por lo que usted debe igualar velocidad que vas adelante en línea recta.
Repite una y otra y otra vez, este algoritmo básico continuamente ajusta a la Rover de seguimiento para que mantenga la distancia deseada de la pared.
Si te encuentras muy lejos de la pared, usted haría similar la toma de decisiones para que vire hacia la pared por desocupado hacia atrás la pista izquierda.
Código de ejemplo...
Motores de control para mantener la distancia correcta de la pared
Si (irValue > = IR_HOWCLOSE + 4) {}
Manera de situ A) demasiado cerca, gire a la derecha
% de % de Motor, izquierda de Motor adecuado
goForward (100, 60);
}
else if (irValue > IR_HOWCLOSE) {}
Situ B) A poco cerrar, gire a la derecha
goForward (100, 75);
}
else if (irValue > = IR_HOWFAR & & irValue < = IR_HOWCLOSE) {}
Bueno situ C), seguir recto
goForward (100, 100);
}
... etc...



")
")

 utilizando un Arduino")






")