Paso 4: electrónica
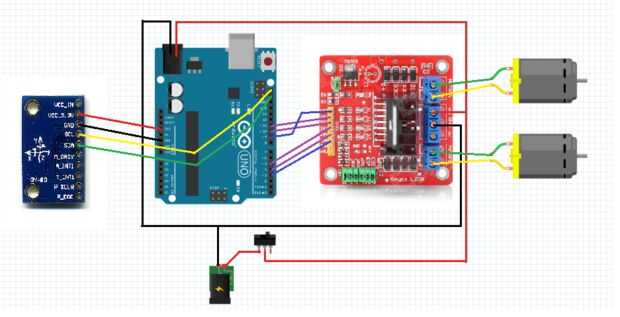

La electrónica que vamos a utilizar en el proyecto es simplemente tres, un arduino UNO (usted puede usar cualquier arduino tienes, no importa si no es arduino UNO), un conductor del motor, en este caso un L298 y finalmente una IMU.
Utilice un controlador de motor comercial basado en el chip del L298, tal vez más de gran alcance que necesitamos para estos motores pero yo lo tengo y funciona bien. Si quieres hacerte el propio controlador de motor DC puede utilizar algunos transistores y hacer un puente H o utilizar un L293, barato y fácil de usar, hay un instructivo donde encontrarás información de cómo hacerlo.
Para IMU usé el 10DOF más barato (10 grados de libertad) encuentro, el chino GY-80 con giroscopio de 3 ejes, magnetómetro, acelerómetro de 3 ejes, sensores de temperatura y barómetro. Utilizamos solamente acelerómetro y giróscopo así que usted puede ahorrar dinero comprando otro IMU, como el MPU-6050, una IMU 6DOF por sólo 3,63€!!!, o acelerómetro y giroscopio para separado.
El IMU está conectada a arduino usando I2C bus (si desea lerarn más sobre I2C mira este instructable), por lo que necesitamos 2 cables de comunicación (SDA y SCL) y 2 cables para la energía, uso 3, 3V por lo que necesitamos 3, 3V alambre y tierra.
El conductor del motor de tomar el poder directamente forma la batería así que no tiene que conectar alimentación de arduino con ella (me refiero a 5V forman el arduino), pero tenemos 6 cables para su control, 3 para cada motor, uno para enviar la señal PWM para el control de la velocidad del motor y para indicar la dirección que queremos que el motor gire.
Consejo: Intente colocar el sensor de la IMU (o acelerómetro) en la línea del eje de los motores pues si localizas la forma extrema de IMU esto puedes obtener mucho error en la medida de acelerómetro, recordar que medir aceleración linear, si ubicarlo a una distancia R del eje cuando el robot cae de forma vertical la aceleración del acelerómetro es la gravedad y R * cuelgan/dt que significa que él introduce un error en la medición.
")










")

