Paso 4: Receptor - el Robot
La antena del receptor recoge los datos de 4 bits serial enviados por el transmisor. Antena está conectada a uno de los pines del receptor. Y estos datos se procesaron más lejos a través del módulo de receptor.
Módulo de receptor:
Los datos de 4 bits serie provenientes de la antena es más procesados y alimenta al pin de datos del decodificador IC HT12E.
Decodificación:
Los datos serie recibidos datos en pin pin es decir no 14 se convierte internamente en forma paralela y los datos de 4 bits en los 4 datos pines del decodificador están similares a la situación de los datos en datos de pins del codificador.
La parte de decodificación es también dependiente en la posición o el acondicionamiento del interruptor DIP de 8 pines. La operación completa dependerá de la posición del interruptor. El interruptor está condicionada el receptor responderá a esa señal y no funcionará si el transmisor y la posición de receptor no es similar o del mismo.
DECODIFICACIÓN:
Cuando se presiona el interruptor particular IC74922 la matriz conectada al codificador IC HT12E permitirá para transmitir los datos particulares asociados a la misma a través del módulo de RF
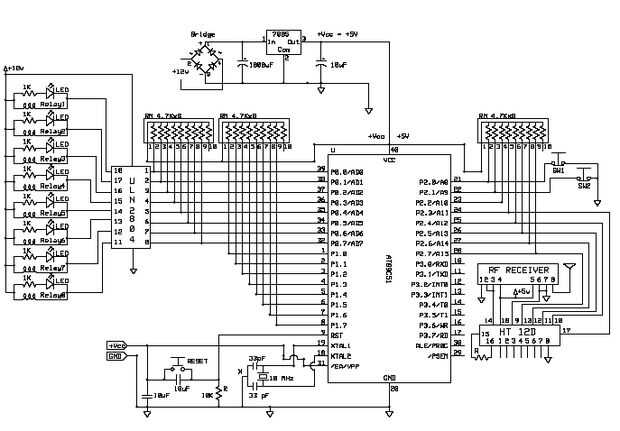
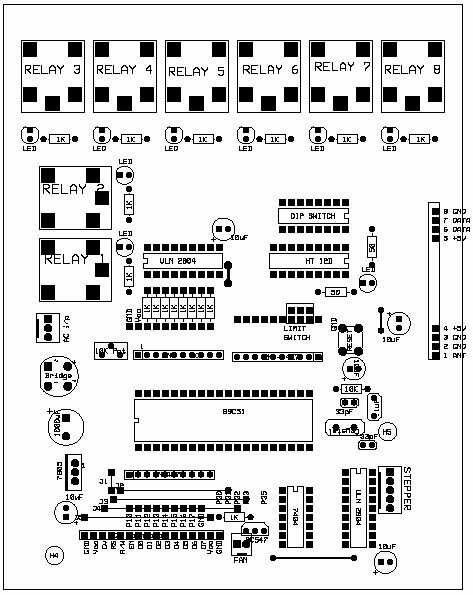
La señal transmitida por el emisor llega a la unidad receptora donde los datos es recogidos por el módulo de RF y proporcionan el decodificador ICHT12D. El decodificador que IC proporcionará datos de 4 bits para el micro controlador y la unidad de micro controlador reconocerán la señal y proporcionarán los datos pertinentes a esa particular IC (ULN2804), este IC conducirá respetados motores conectados a la misma para uso particular.
Hay varias aplicaciones que pueden ser llevados a cabo como imagen captura, emisión de gases tóxicos, etc..
Controlador de motor:
La entrada de los circuitos de controlador de motor viene del IC (ULN2804). El circuito controlador de motor consiste en el "controlador de relé". Utilizando este circuito un motor se puede conducir en una dirección a la vez. Conexión en paralelo también puede conducir más de un motor según los datos facilitados al circuito controlador de motor, se puede controlar la dirección del motor, y se puede mover el vehículo robótico según el requisito.
La parte principal de la unidad de controlador de motor es la unidad de controlador de relé, que consisten de dos relés a la unidad de un solo motor en sentido horario y antihorario y a momentáneamente controlar el movimiento del vehículo.




 :-)")



")




")