Paso 11: Y la mano



Puede utilizar cualquier motor de caja de cambios si usted puede conseguir el engranaje de vex a permanecer sobre el eje del motor. El motor que utilicé aquí quedó de otro proyecto. Una nota que necesita saber acerca de este motor es la tapa marrón tornillo a la placa en el motor que gira el motor.
Perfore un agujero de centro a través de la tapa de modo que cabrá un #8-32 por 1 3/4" tornillo. Tomar la cabeza del tornillo y moler abajo de los dos lados un poco para que la cabeza es ahora un rectángulo con los extremos de dos curvas. Esto dificulta que el tornillo para que se suelte cuando pegan. Poner el tornillo a través de la tapa con la cabeza apuntada hacia la placa del motor. Vestíos de la tuerca y apretar.
Dependiendo el motor caja de cambios utiliza, la madera de tamaño mi ser deferente.
Cortar dos 3/4" pieza gruesa de madera 7" por 2 2/16". Una de estas piezas se convertirá en base de carril, el otro la placa trasera de la caja del motor de la mano. Cortar dos 3/4 trozos gruesos de madera 1 10/16 por 2 2/16 "son los lados de la caja del motor de la mano.
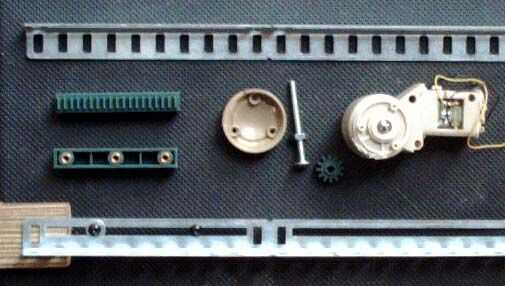
Si te fijas en las fotos usted verá dos L en forma de soportes. Se trata de 1 7/16" de 1 7/16" con un extremo en la forma de encajar el engranaje de estante. Éstos fueron hechos de un somier viejo. ¿Qué puede encontrar que funcione? Estos fueron cortados usando una sierra con disco utilizado para corte de metal de un corte. No hay herramientas de lujo fueron utilizadas en la fabricación de este robot.
Perfore dos agujeros a través del soporte y a través de la parte del engranaje de estante. Monte el soporte en el engranaje de estante con dos tornillos con tuercas.
Corte de las piezas de metal de VEX. Es mejor utilizar una sierra de corte como un corte disco tarda demasiado metal con ella. Para la gente que no sabe nada de VEX. Las piezas de metal vienen con un arranque poco cortado para mostrar dónde se puede cortar. Vamos a usar la parte más pequeña, así cortar. Utilizaremos dos. Con los tornillos que vienen con el engranaje de estante, atorníllelo en la ranura de metal con dos tornillos con dos arandelas de metal. Ahora aquí viene un problema; Apriete los tornillos de todo el camino en el estante de engranaje no puede moverse. No apriete los tornillos, vienen sueltos en ningún momento. La solución es; utilizando aluminio diaria hacen pequeñas bolas y empuje poco ellos abajo los agujeros del tornillo. Tomar el engranaje de cremallera, tornillo nuevo en la ranura metálica. Si el engranaje de estante todavía se une, repita. Cuando usted consigue el engranaje de estante derecho, sacar los tornillos y poner un poco de pegamento en los agujeros del tornillo. Poner lo tornillos detrás en y deje de secado.
Tomar el conjunto de engranaje de estante y atornille en la base del riel. Aquí no utilice tornillos drywall. Desea utilizar un tornillo con cabeza plana para que el conjunto del riel puede ajustarse por una pequeña cantidad. Tomar el conjunto del riel y espacio el ancho de la marcha poniendo el engranaje entre los engranajes de dos parrillas. Ahora Atornille el ensamble del engranaje 2 º estante. Sacar el engranaje y el lado el estante de los engranajes en direcciones opuestas. Vuelva a colocar el engranaje en el centro y marca Dónde está el equipo.
Perfore un agujero lo suficientemente grande como para el #8-32 por 1 3/4" tornillo pase a través sin atascamiento. Tomar el conjunto del riel base de carril. Corte base del carril de la parte superior al agujero lo suficientemente ancho como para el tornillo a lado a través de la ranura.
Coloque el engranaje sobre el tornillo. Se trata de un ajuste muy apretado. Usé un alicates de bloqueo de canal para sostener el engranaje gira el tornillo. Gire el engranaje sobre el tornillo hasta que el equipo incluso donde el engranaje de estante es con la tapa cerca de la de base pero no vinculante para él. Cuando todo se ve bien cortado de lo que no es necesario el tornillo #8-32. Poner pegamento en la cabeza del tornillo que se encuentra dentro de la tapa y deje secar. Poner pegamento en la tuerca y alrededor de la base de la marcha. Cuando está todo tornillo seco la tapa detrás del motor. Lado el montaje del engranaje del motor a través de la raja hasta el agujero. Utilizando un sello de la pistola de pegamento caliente la raja. Vuelva a colocar el conjunto del riel.
Cortar 3/4" pieza gruesa de madera 1 9/16 por 1 9/16. Esta será la base del motor. Coloque el motor en esta base. Ver si el motor es paralelo a la base del carril. Si parece buena entonces atornille la base del motor en el riel de base. Pegar el motor a la base del motor. Clavar los lados a base de carril. Te darás cuenta que el eje trasero del motor está pegando para arriba. Marque y perfore entonces este punto en la placa trasera para que el eje trasero tiene un lugar para ir. Atornille la placa trasera.
Los dos dedos de la mano están hechos de dos 3/4" pieza gruesa de madera 3 1/16" de 1 11/16". Puede cortar una muesca en la madera donde se atornillarán en el soporte. Haciéndolo de esta manera permite la mano abrir un completo 3" y puede cubrir las cabezas de soporte y tornillo con cartulina. Perfore dos agujeros en cada soporte que permitirá que los tornillos que se utiliza para pasar a través de los orificios del soporte. Marque y perfore agujeros en los dedos. Ahora montar los dos dedos y atorníllelos en su lugar.
Utilizando dos tornillos de 1 1/2"# 6 para adjuntar esta Asamblea de mano a la parte inferior del montaje del rodillo.
AL final













