Paso 2: cableado


Para conseguir la configuración completa necesitará alambre MPU-6050 para Arduino usando SPI.
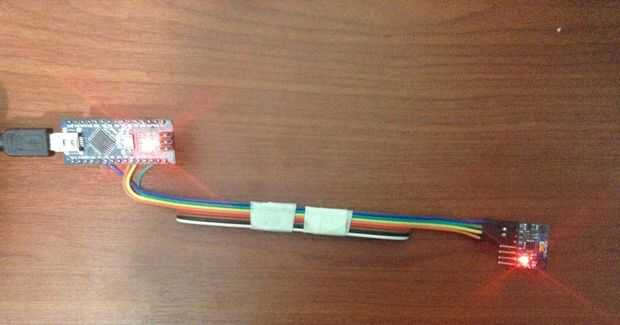
Aquí es cómo yo por cable:
MPU-6050---Arduino Nano
---SDA------------------A4---
---SCL------------------A5---
* No te olvides de los pasadores de alambre: 3.3v y GND.
")












