este Bot Sumo fue la escuela secundaria del siglo, de Rochester, Minnesota, entrada del equipo la Olimpiada de la ciencia en la competencia estatal en 05 de marzo de 2011. Aunque no hicimos tan bien (25 de 32 equipos), todavía decidí Mostrar mi traba
este año compitió en el evento de torres de Olimpiada de ciencia y colocó 6 sostener todo el peso requerido. Las reglas eran bastante difíciles de entender, y esa es la razón principal que sólo colocar 6. En la normativa, se establece que la carga so
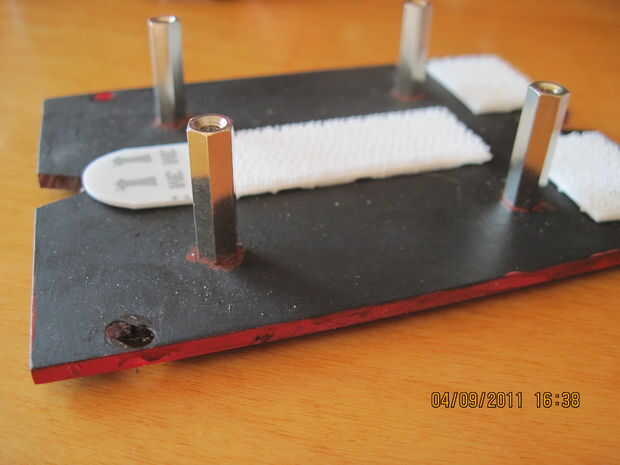
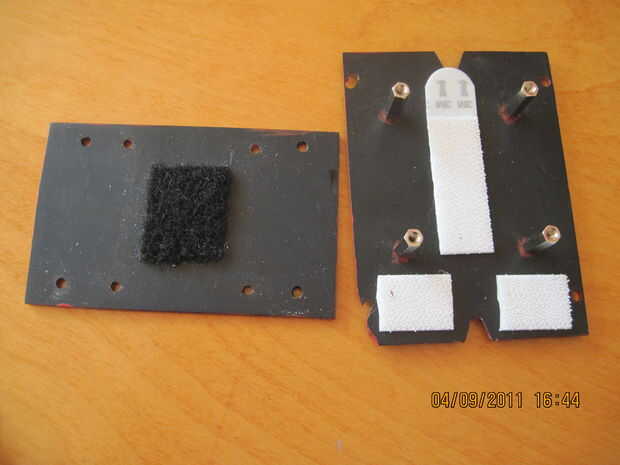
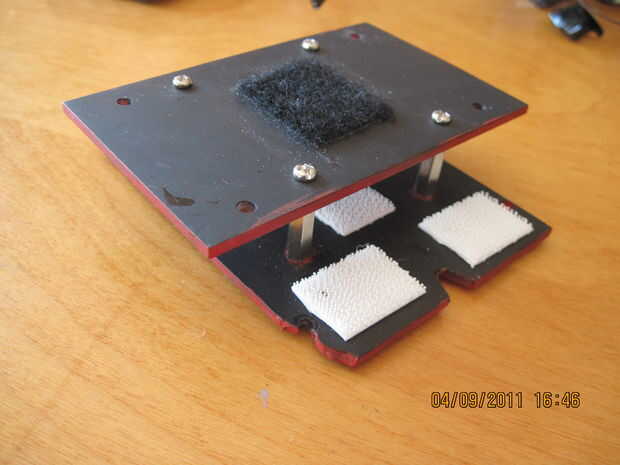
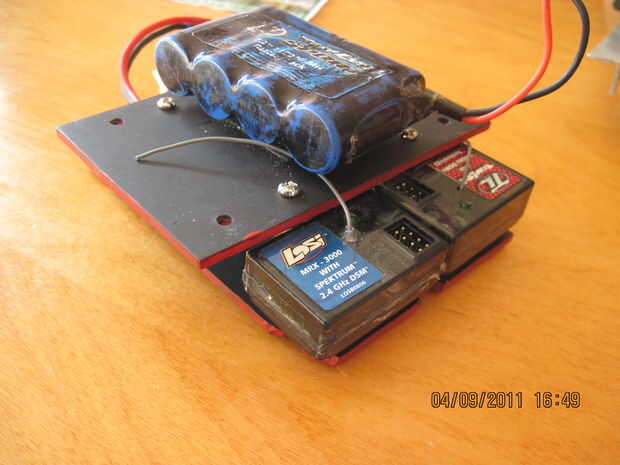
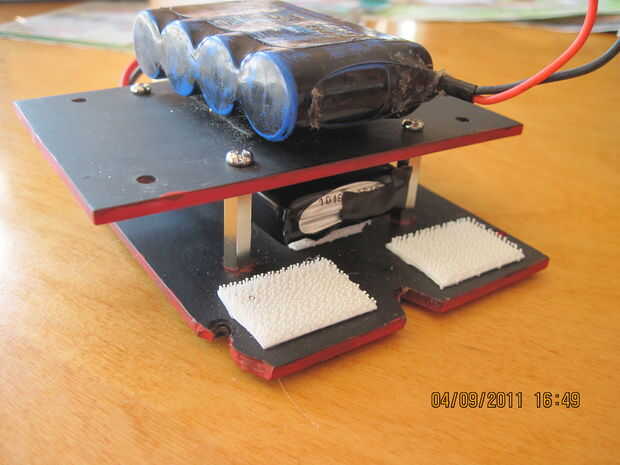
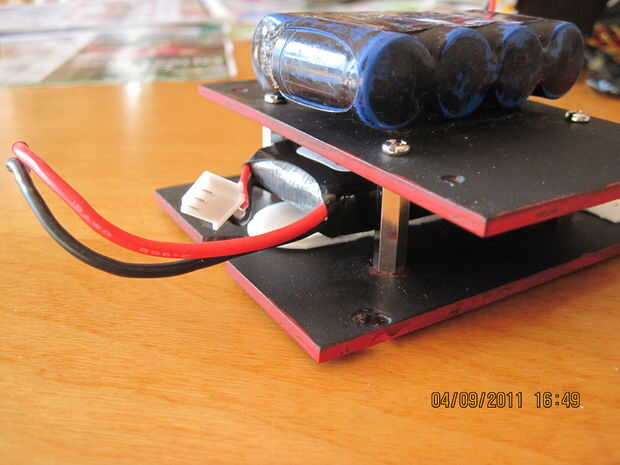
¿Quieres aprender a construir un robot?Este Instructables te dirá cómo construimos nuestros 20 libras (9,07185 kilogramos) autónomoRobot de sumo.Esto es como empezamos con la construcción de motores de sumo. La universidad local que lleva a cabo la c
Prepárate para rumble, es tiempo de prepotentes! Esta semana he construido una $90, controlado por Android bluetooth sumobot. Esta es una divertida manera de pasar tiempo con tus amigos y participar en torneos multijugadores! Tal vez tuvo en su patio
)Bienvenida 2016 equipos de Olimpiada de ciencia! El brazo Robot está de vuelta y ¿estás listo para hacer algunos robots kick-culo? Por favor deja un comentario debajo de algo nos de mensajería para que la comunidad pueda crecer en su conjunto. Nos e
He comprado unas botas de jungla Rothco (botas) en mi tienda local de ejército marina de guerra para un viaje próximo río. Recomiendo comprar en persona como el dimensionamiento está seriamente fuera de lo que usaría normalmente. Normalmente llevo un
Bot Sumo este fue diseñado, construido, programado y probado durante un período de 12 semanas para uno de mi último año de clases de ingeniería. El objetivo fue diseñar y construir un ligero sumo totalmente autónoma lucha contra el robot para una cla
este es el siglo secundaria ciencia Olimpiada brazo del Robot que compitieron en el torneo de la Olimpíada de Ciencias de Minnesota 2012 estado con 32 otros equipos. Construí y funcionó este brazo de robot de control remoto para el torneo, colocando
hace unos años escribí un breve documento sobre los métodos para fabricar rápidamente elementos de sistemas mecánicos titulado Cómo construir su Robot realmente muy rápido. Se atiende a estudiantes del MIT 2.007 introducción diseño y fabricación de c
Pedimos nuestro proyecto RUFS, Robotic Uurbana Fbrazo SystemUna huerta hidropónica verticalPara permitir a alta densidad rendimientos y ciclos más cortos de crecimientoReducir el consumo de recursos - agua, fertilizante y espacioAhorro mano de obra -
siempre quiere disparar a un blanco de papel sin apoderaba su BB pero no quiero comprar uno de los objetivos de la red? Por favor sea bueno este es mi primer instructable. Para aquellos de ustedes que no saben donde conseguir blancos de papel puede d
Crear una IoT activado controlador de hidroponía con el Edison de Intel durante el IoT Hackathon de BostonNuestro objetivo:Dentro de un hackathon de 36 horas para construir un controlador a utilizar con nuestro anterior instructable (hidropónico gran
Servos traen vida a nuestras ideas. Servos pueden ser misteriosos, pero en realidad son muy simples. Servos usan un simple pulso electrónico para decirles qué ángulo que quieras ir a. Es electrónica no digital, pero hay servos digitales y son diferen
este instructable le mostrará cómo hacer tu propio arduino basado en el reloj que indica la hora usando una matriz de LEDs. Este es mi primer instructivo, así que si algo está claro me dejan un comentario o enviar un mensaje!Me inspiré por todos el f




")


")
")








