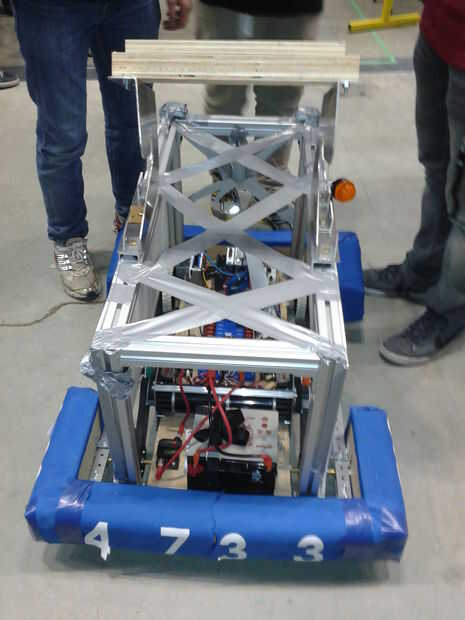
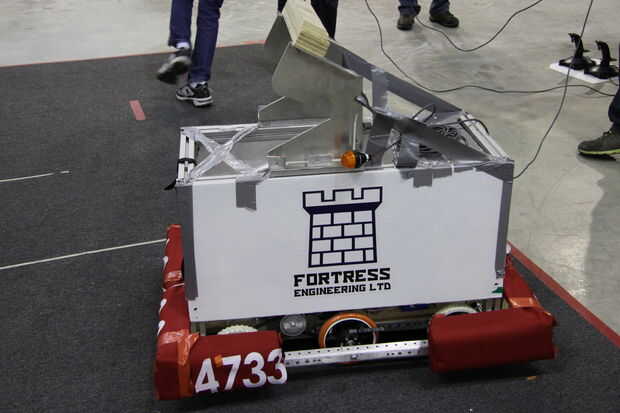

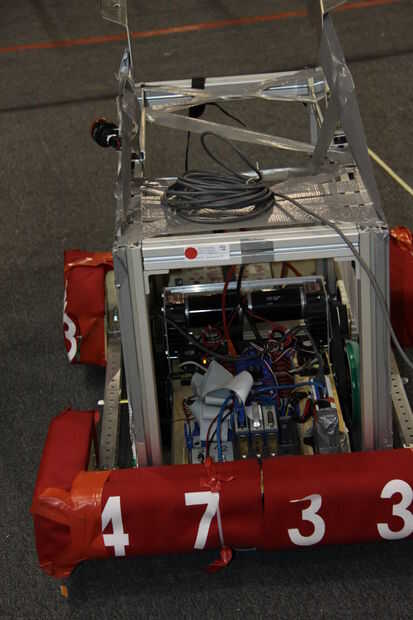



Nuestro robot tomó forma lentamente por muchas razones, pero en las últimas dos semanas comenzamos en un frenesí de actividad y sorprendentemente había producido un robot viable. Podría caer en la más baja de las ranuras de discos voladores, también tenía una red en la parte superior para interceptar el Frisbee del otro equipo. La base fue construida con rieles de aluminio "X" y la parte superior de madera contrachapada. Nos re-purposed un lazy susan para girar y permite discos voladores a deslizarse por una rampa de plástico.
También hemos diseñado unos ganchos después de nuestro robot fue embalado lejos. Estaban basados en modelos de cartón y bosquejados áspero para adaptarse por lo que pudimos ver a través de la bolsa de plástico gigante que el robot tenía que permanecer en el hasta el día de la competencia.
Cuando llegamos en el óvalo olímpico el jueves para el regional de FRC canadiense occidental, nos puso inmediatamente a trabajar instalar nuestros ganchos recién hechas. Entonces preguntamos a algunos otros equipos ayuda con nuestra programación, que estaba todavía no comportando correctamente, por suerte para nosotros equipo 4105 (creo) nos dio una mano (de cerca de 5 horas). Luego probamos una práctica ronda, pudimos poner a prueba todos los sistemas incluyendo los ganchos, que todos nos sorprendimos al ver perfectamente la primera vez que trabajó. Sin embargo una mal conectado la cámara GoPro cayó en la electrónica y todo lo frito. Después otro par de horas con los primeros mentores fijamos la electrónica. Por este tiempo se terminó el primer día.
El viernes llegó y estaban todos un poco aturdidos porque todo estaba trabajando. Competimos en nuestro primer emparejado y todavía todo estaba funcionando, esto fue preocupante porque normalmente (basado en la experiencia de jueves) algo tendría que fijarse después de cada partido. Fue durante nuestro segundo encuentro que nuestra suerte funcionó hacia fuera y se destruyeron todos nuestros planes cuidadosamente trazados. Al subir a la torre de la mitad superior de nuestro robot podado. Esto significó que nuestra puntuación total y sistema de bloqueo fue totalmente arruinada.
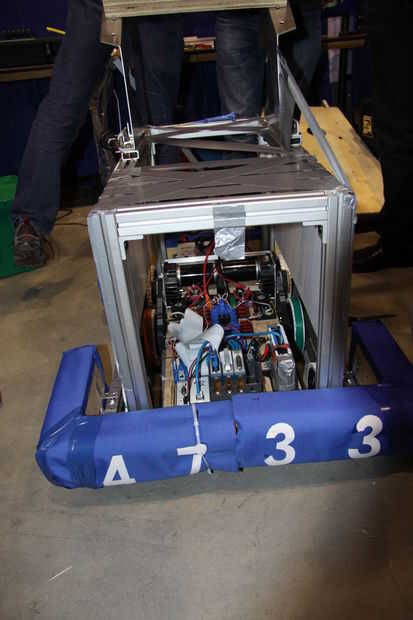
Cuando llegamos a ambas piezas de nuestro trabajo previamente robot de los hoyos que nos dimos cuenta que el problema era peor de lo que parecía, y parecía bastante malo. El marco inferior era desalineado y los soportes de esquina habían doblado o roto, y la electrónica una vez más no funcionaban. Esto significa que necesitaríamos varias horas jugando y apretar, junto con piezas de repuesto de algún otro equipo, y un montón de mentor ayuda a conseguir algo que incluso podríamos conducir. Esto fue cuando diseño salió de la ventana y comenzó el montaje de jurado (o Jerry?).
Iniciamos una vez que el marco fue cuadrado para arriba, tomamos nuestra parte más grande de madera, taladrados de agujeros y atornillados entre los dos (sólo ligeramente flexionados) ganchos con la esperanza de que sean capaces de sostener nuestros 90 libras de robot. Encontramos entonces un problema, los ganchos que tienen igual peso a ambos lados para equilibrar el robot en el peldaño más bajo de la pirámide. Pero con la parte superior de la mitad de nuestro robot, falta el punto central fueron los ganchos se montaron ya no era el punto de equilibrio. Para solucionar esto empezamos pato taping y zip atar diversos artículos, incluyendo llaves y botellas de desinfectante de la mano en diferentes lugares alrededor del robot hasta que teníamos algo cerca equilibrio.
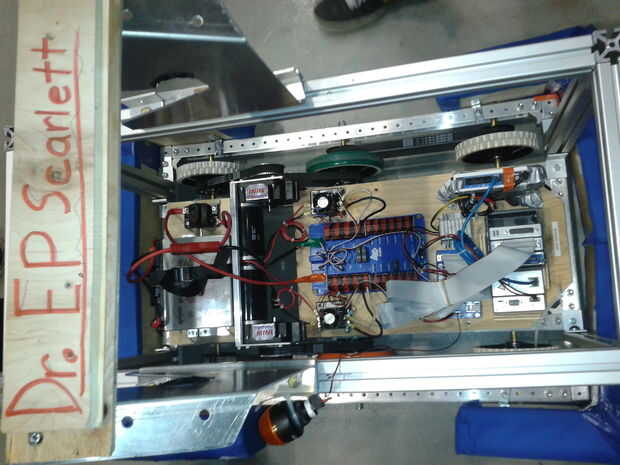
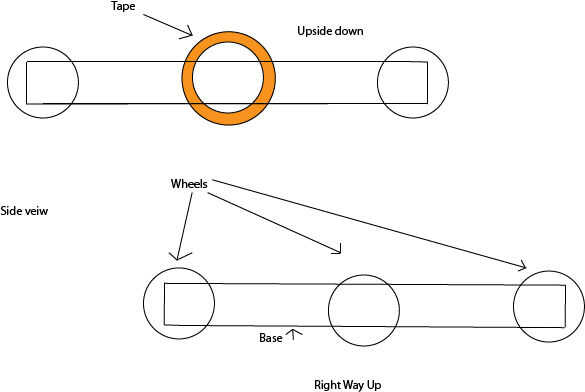
En este punto entramos una vez más en un partido sólo para aprender que misteriosamente nuestro robot era solamente mover hacia delante y hacia atrás, no gira lo que se suponía. Pensamos que se trataba de un problema de codificación, pero resultó que había colocado nuestro bastidor boca abajo, para que los wheals del mediados eran más altos que la parte delantera y trasera, lo que significa que en lugar de un giro en una máquina de manipulación de la moneda de diez centavos que ahora intentábamos hacer una gran caja rebelde. Hemos solucionado esto envolviendo cinta aislante alrededor de las ruedas varias veces hasta que tuvimos una capa lo suficientemente gruesa que la media rueda fue una vez más tocar el suelo. Nuestra dirección fue restaurada, la última cosa a hacer era amarra nuestros topes (el relleno en los lados del robot) en un más seguro lugar y cruzan los dedos.
Todos nuestro McGyvering pagado apagado terminó llegando octavo de treinta. Nos quedamos muy sorprendidos, incluso tuvimos que elegir a nuestros socios, para la final al día siguiente, algo que aún no habíamos considerado que tienen que ver. Después de recoger a otros equipos de novato de Alberta que nuestro equipo, nos dirigimos luego en la final. Nosotros sólo hizo dos juegos antes de ser golpeado una patadas de la final. Durante la ceremonia final nos concedieron el equipo de novatos de semilla más alta del año, que puso una cereza en la parte superior un maravilloso días.
En primer lugar es un excelente concurso que me permitió explorar mi afición por hacer cosas de una manera que nunca pensé que sería capaz. Así que si quieres participar pide alrededor de su escuela y ver si usted puede encontrar cualquier patrocinadores locales. Lo recomendaría a cualquier persona interesada en marketing ingeniería o programación o incluso.
Las respuestas al hacer a aprender juventud concurso ***
Todos los miembros del equipo son entre 13-18
Lo que hicimos:
Hicimos un robot de 95 libras capaces de comportamiento autónomo y comunicaciones inalámbricas. Nuestro Robot, antes del accidente, fue capaz de subir una pirámide metálica grande, mantener y entregar discos voladores y la liberación en el lugar correcto. También fue capaz de interferir con el funcionamiento de otros robots usando una red grande que recoger discos voladores de opositores y añadirlos a nuestro envase. Después del accidente sólo fuimos capaces de subir el primer peldaño y marcar discos voladores durante el período de tiempo autónomo.
Cómo lo hacemos:
Esto era una construcción muy larga y complicada, pero no somos constructores de robot muy experimentados, por lo que nuestros métodos de construcción eran muy simples. La base del robot era aluminio construido de la forma "X" rieles y pernos. La parte superior, antes del accidente, fue hecha de madera contrachapada y una placa giratoria (gabinete) de Susan perezosa. Utilizamos las herramientas en nuestra tienda de madera de las escuelas principalmente de la Sierra de mesa, taladro y sierras manuales. Después del accidente recurrimos a métodos incluso más simples para volver a construir el robot, cinta pato, abrazaderas de plástico y algo de suerte.
Eran nos hizo:
Construimos el Robot después de la escuela en nuestras escuelas taller madera. Tuvimos alguna ayuda al principio en el Southern Alberta Institute of Technology. Nuestra reconstrucción tuvo lugar en el Oval Olímpico de la Universidad de Calgary.
Lo que aprendí:
No puedo hablar por el resto de mi equipo, pero la cantidad de cosas que aprendí durante esta construcción podría probablemente doble la longitud de este Instructable ya muy largo. Así que proporcionará descripciones de las habilidades que aprendí más detalles. Aprendí cómo cablear un robot: la manera de un ordenador portátil se comunique con un router inalámbrico, y la manera de un router inalámbrico almacena y transmite la información a un procesador a bordo del robot. He aprendido algunos conceptos básicos del lenguaje de programación Java. Me incliné también algunos importantes toma de decisiones y habilidades de gestión de tiempo. Ahora creo que puedo hablar para todo el equipo, nos hicieron todos los amigos y se inclinó sobre el trabajo en equipo y un poco sobre cómo es grande y útil es la primera comunidad, también llegamos a interactuar con estudiantes de la Universidad y conocer las opciones de educación post secundaria.
***********
Gracias por leer (lo siento es tan largo), si te gustó por favor deje un comentario, calificación, o un voto. -Lucas
")

")









")
 - Makeblock, Arduino, Droidscript")