Paso 3: El sistema de dirección
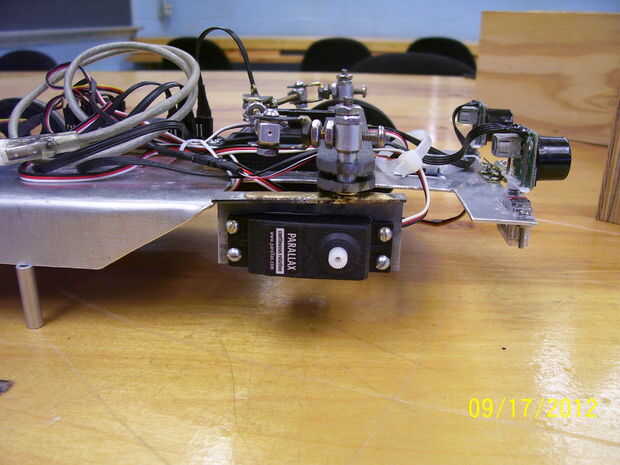

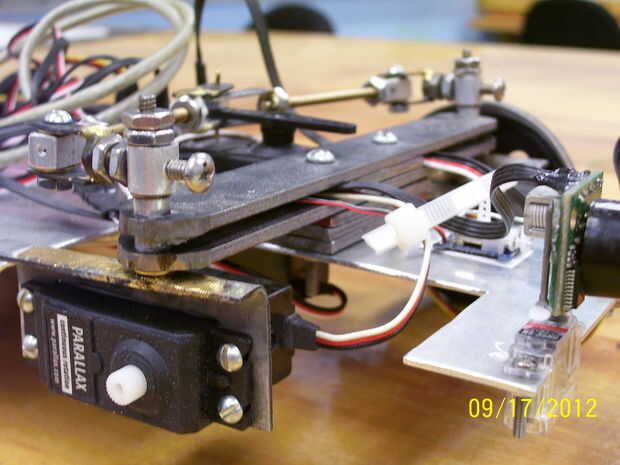


Estos vínculos se hacen para ser ajustable y pueden ser calibrados por errores de fabricación. Comienza por cortar el metal plano barra piezas basadas en los planos. Debe haber un total de 6 piezas apiladas juntas para formar una dirección abrazadera 3/4 de pulgada de altura sobre el armazón de metal de hoja. Ver las fotos para ver la disposición del piso pedazos de la barra. Los cojinetes para el eje de la dirección es un pasador de apoyo de aluminio que originalmente estaba ensartado por un Boebot Parallax. Taladro con cuidado esta pieza hacia fuera a la anchura de la uña con una prensa del taladro asegurándose de mantener el taladro vertical en el pasador de aluminio. Si es difícil de perforar un agujero recto con una broca de mayor tamaño, considere el uso de un taladro más pequeño primero que es más fácil de controlar para hacer un agujero piloto. Lisa si es posible, dentro de esta manga con papel de lija fino o tela azafrán para reducir el desgaste en el eje del cojinete. Este manga es sostenido en lugar por la fricción creada por los dos separados barra placas. Perfore el orificio en el piso de la barra ligeramente más pequeña que la manga por lo que puede ser aprovechado suavemente en su lugar con un martillo. Si el manga se lleva a cabo libremente por el plano barra placas, puede perforar un agujero cerca de la manga que se puede insertar un perno y las piezas del plano de la barra junto que sostenga la manga en lugar de la "abrazadera".
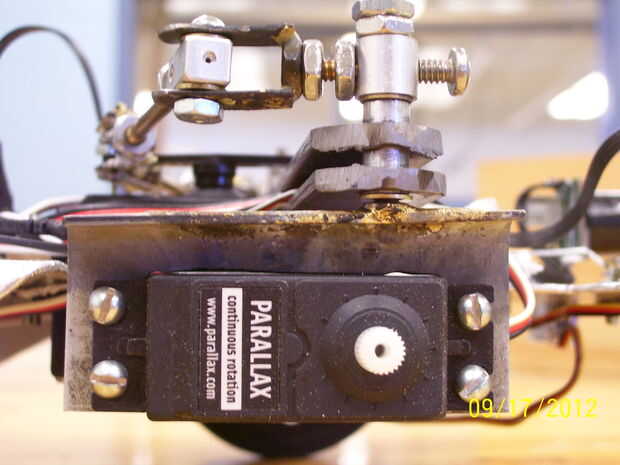
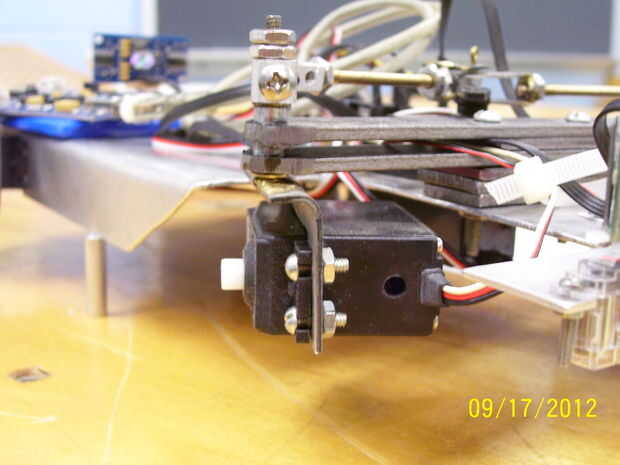
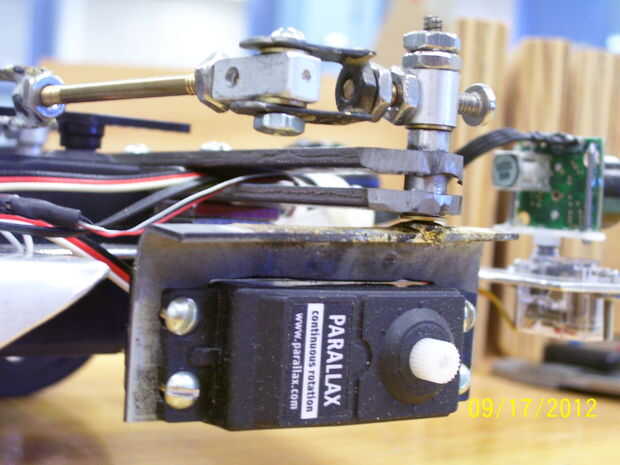
El soporte del servo están hechos de una pieza de metal que se doblará en la parte superior y provee una pequeña área plano donde un clavo puede ser unido por soldadura fuerte, soldadura o soldadura de plata según el metal utilizado. He utilizado una placa de acero soldada a un clavo de acero común.
A continuación hacer manga de 'lock' que se fija al eje y se conecta a los vínculos de la dirección. Otra vez, se trata de un perforado hacia fuera de la funda que tengo de partes para un Boebot Parallax. Gire este manga a su lado así el agujero que va a través de él es horizontal y coloca en una mordaza movible (o encontrar una forma de sujeción en su lugar por ejemplo, Visegrips). Coloque el tornillo con un taladro y perforar un agujero a través de su centro de la anchura del interior diámetro del hilo que vaya a utilizar. Use pinzas para encontrar el interior diámetro de if los hilos (entre las crestas). Este agujero con un golpecito y mueren en el hilo deseado que debe ser alrededor de un perno de tamaño #6 del hilo de rosca. Empuje hacia abajo firmemente con la llave y gire hacia la derecha. Ir totalmente a través de la manga para garantizar buenos hilos de por lo menos un lado. Usted puede intentar esto en un pedazo primero familiarizarse con el proceso.
Haga clic en imágenes para notas. Después, conecte los dos vínculos al servo con algunos espaciadores y una chaveta. Experimento con la otra sostiene en el brazo del servo para determinar que funciona mejor para usted.





")
 Stage1Model2")
 /w Arduino")





