Paso 4: Parpadeo de LED
En este paso nos marquen un LED intermitente, similar a este tutorial instructable. Aunque este es un paso simple, podría ser útil obtener más información acerca de cómo funciona la configuración, como no vamos a través de puntos específicos en este paso.
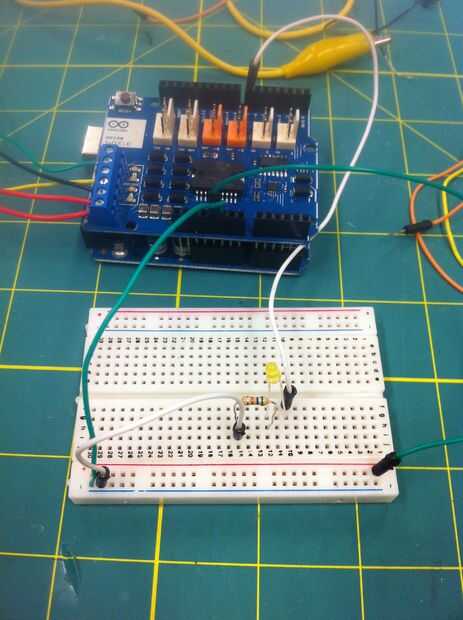
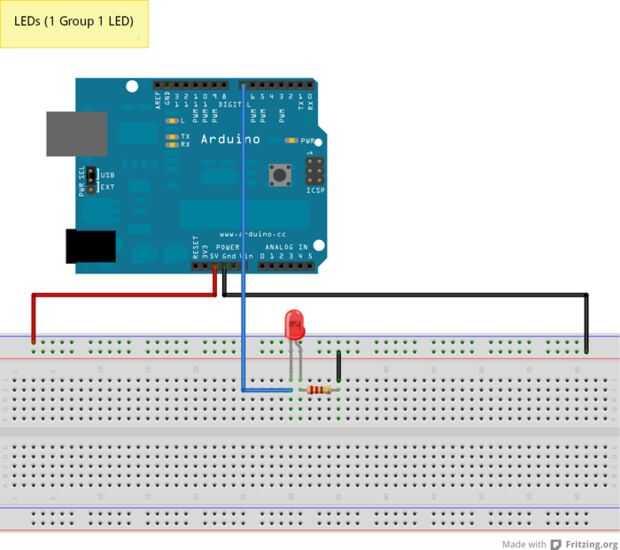
Configuración de un LED
Usando el diagrama del circuito, establecido un LED y la placa arduino. Para este paso, se eliminaron los sensores de la fotocélula, por lo que sería más fácil ver el circuito del LED. Recomendamos hacer esto también facilita completar cada paso sin trabajo previo en el camino de la placa y finalmente nos quería reorganizar el tablero por lo que se configuró como óptimo como podríamos conseguirlo. Probablemente, usted tendrá que reorganizar su protoboard también.
Utilizamos el siguiente código para conseguir el parpadeo del LED. Primero encienda el LED, luego hacer una pausa por un segundo para dejar el LED en. Entonces apaga el LED y otra vez una pausa por un segundo, para que el LED permanece apagado. Este entonces causa la acción intermitente a suceder.
/*
void setup(void) {}
Serial.Begin(9600);
pinMode (5, salida); Inicializa el pin 5 para LED
}
void loop(void) {}
digitalWrite (5, alto); encender LED
Delay(1000); retardo de 1 segundo
digitalWrite (5, bajo); sistema LED apagado
Delay(1000); retardo de 1 segundo
}
*/
Video de un LED
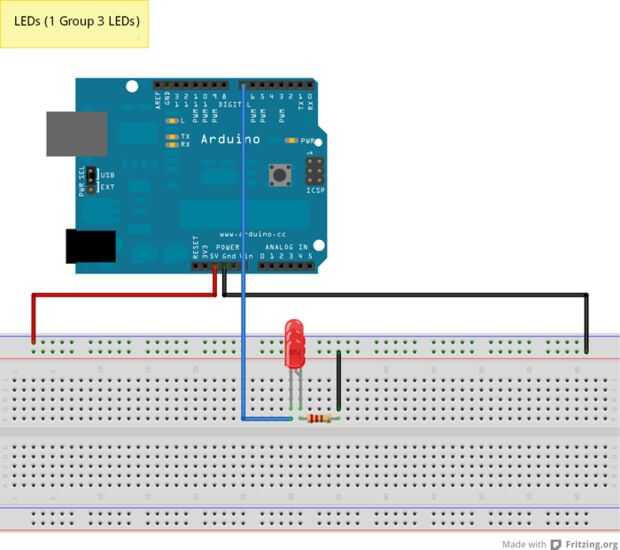
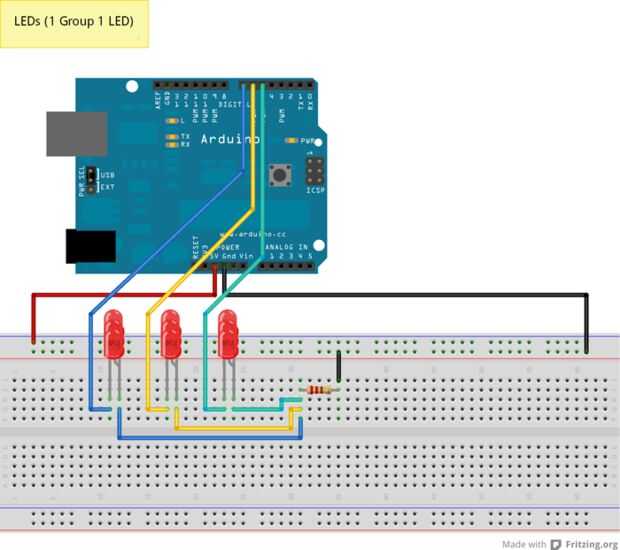
Configurar múltiples LEDs
Para añadir más LEDs en el mismo circuito, se deben colocar los LEDs en paralelo, y todo lo demás será el mismo. El mismo código se utilizará en esta parte también porque nada ha cambiado.
La serpiente contiene tres grupos de LEDs, cada una con 6-7 luces en cada filamento. Para crear grupos de LEDs, es el mismo proceso que crear un solo grupo con un único LED en él. En nuestra serpiente utilizamos Pin 5 Pin 6 y Pin 7 para controlar los diferentes filamentos de los LEDs. También para ahorrar espacio en nuestra protoboard, conectamos cada grupo de LED a la resistencia misma que conecta a tierra.
Código usamos:
/*
void setup(void) {}
Serial.Begin(9600);
pinMode (5, salida); Inicializa el pin 5 para LED
pinMode (6, salida); Inicializa el pin 6 para LED
pinMode (7, salida); Inicializa el pin 7 para LED
}
void loop(void) {}
digitalWrite (5, alto); encender LED
digitalWrite (6, alto); encender LED
digitalWrite (7, alto); encender LED
Delay(1000); retardo de 1 segundo
digitalWrite (5, bajo); sistema LED apagado
digitalWrite (6, bajo); sistema LED apagado
digitalWrite (7, bajo); sistema LED apagado
Delay(1000); retardo de 1 segundo
}
*/
Video de LEDs múltiples













