Paso 9: Vuelva a colocar el cableado
Al crear el proyecto en pasos anteriores, todo fue unida muy estrechamente a la protoboard. Si queremos un serpiente que toda la longitud de la base, necesitamos crear extensiones de cable para varias partes de la electricidad.
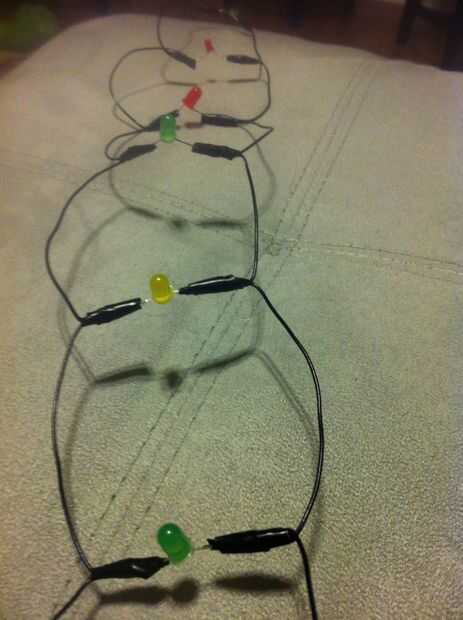
Los grupos de LEDs va cada necesidad de poner en sus propias cadenas para que las luces pueden ser distribuidas por el cuerpo de la serpiente.
El motor de la vibración deberá ser tan larga como la serpiente sí mismo por lo que será capaz de cascabel de la cola.
Sensor de luz ambiental tendrá que ser colocado cerca del centro o al final de la serpiente, por lo menos lo suficientemente lejos que no detectará cualquier luz dirigida hacia la cabeza.
ADVERTENCIAS
Al conectar cables a los LEDs, asegúrese de que el cableado se conecta al lado largo o corto de cada LED. No se puede conectar a diferentes partes de un LED en el mismo circuito, no podrán activar.
Cuando reemplaza el cableado, nos sólo torcido al final de la obra eléctrica y el cable para conectar el circuito. Si es posible, se recomienda soldar estas piezas juntas, creará un vínculo más fuerte y es menos probable que romper. Necesitábamos regresar algunos de nuestros materiales para el aula, así que torcido final cables juntos y cada uno de ellos envuelto en cinta aislante para unir el lazo.
Asegúrese de que no hay ningún alambre expuesto. Cuando todo se oculta bajo el cuerpo de serpiente, pueden cruzar los cables y si algunos de los cables está expuesta, se cruzan circuitos y ocasionará que la serpiente un mal funcionamiento.













