Paso 2: Configuración de Hardware
Este paso va a tomar algún tiempo para completar. Voy a suponer es que utiliza el kit de la robusteza de Robophilio este Instructable, pero el mismo concepto funciona para cualquier robot.
1. Comience por destripar a la Robophilio y sacar su stock placa de circuito. Utilice tornillos para abrir la parte posterior de la misma. Para cualquier robot a sacar su tarjeta controladora principal. Recuerde que estos robots tienen un número demente de servos. El Robophilio, o cualquier robot humanoide, viene con una hoja de datos que te muestra donde cada servo se conecta en el circuito común. Cuando usted toma cada servo cable, asegúrese de que usted recuerde que servo cable perteneciente a, de lo contrario usted tendrá que pasar por un montón de pruebas para ver que cable va a que servo.
Sugeriría utilizar algún sistema para etiquetar cada cable del servo como se saca. Simplemente se utiliza cinta de enmascarar. He grabado un pedazo pequeño en cada cable y etiquetados con el servo que perteneció también. Así que escribí para el servo del hombro izquierdo "L hombro",
A continuación sacar la pila que está en la parte delantera del robot (ocultado en el área de la entrepierna del robot).
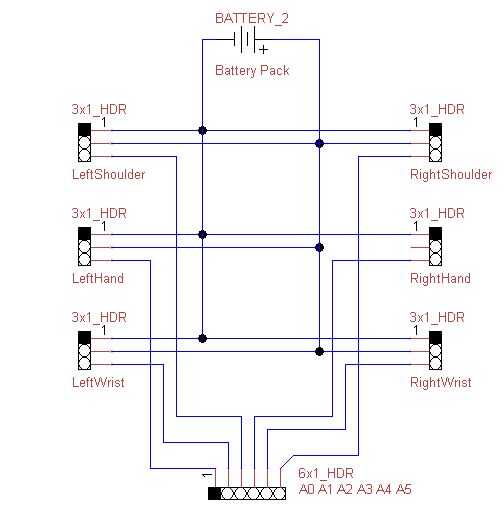
2. Inicie tomando un protoboard pequeño y conectar los cables de la batería, positivos y negativos, a la protoboard. Conectar todos los positivos de cable de servo a la línea positiva de la batería. Lo mismo para la tierra. Luego conecte las líneas de señal de cable de servo a los pines de Arduino adecuados. El diagrama esquemático demuestra todo. También puede tomar un vistazo al código para ver que servo se une a que pin del Arduino.
Si tienes el Robophilio: el código que os he dado ya maneja los grados para cada servo y su min/max.
Si no tienes el Robophilio y luego empezar por crear el circuito básico que se describen arriba. Una vez hiciste manualmente tendrá que probar cada servo asignando valores a averiguar su min/max. Te sugiero mover los servos en incrementos de 5 grados para calcular valores exactos. Este es un paso bastante básico y no ir sobre él en detalle.
3. ahora que tienes todo lo hecho por el lado del robot. Conectar el Kinect Microsoft a su ordenador y asegúrese de que tener todos los controladores adecuados que necesita para que funcione.
")











")
