Paso 2: sensores
![]()
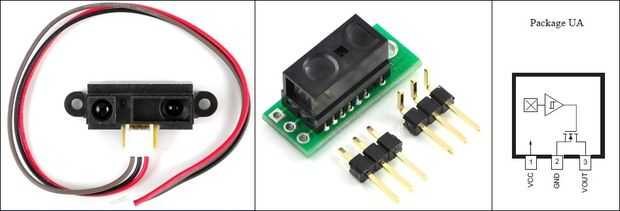
Un robot control remoto responde a los sentidos del operador; pero un robot autónomo debe tener sensores propios a su entorno. Este robot tiene 2 IR (infrarrojos) reflexivos sensores digitales (es decir, su salida es ya sea alto o bajo, haciendo para una fácil integración en los puertos de un microcontrolador). Un sensor de infrarrojos está mirando hacia adelante: envía un haz modulado de la luz y se baja si la amplitud de luz reflejada corresponde a una distancia de 10cm o menos. Éste se utilizará para evitar que el robot se introduce dentro de las paredes. Otro sensor IR se colocará hacia abajo para buscar acantilados (es decir, el borde de una mesa u otra superficie) por lo que el robot no se ejecuta sobre él. Entonces, detrás del robot es una estantería baja con 6 digitales sensores de efecto Hall que detectan campos magnéticos. Alambré 6 todos en paralelo, por lo que si cualquier un sensor de baja el autobús pasillo entero baja en el puerto PICAXE.











")

