


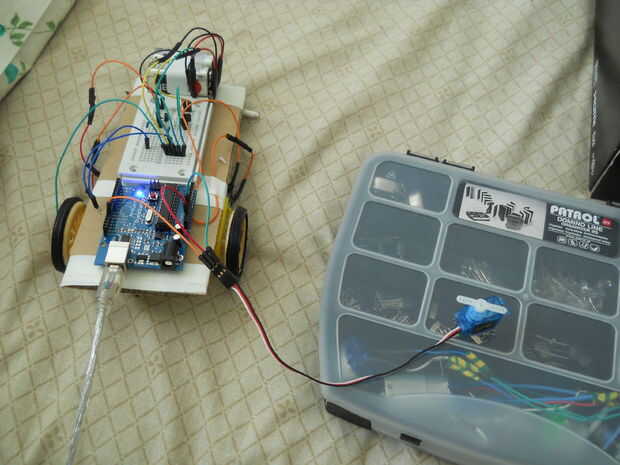

Siempre me gustó ir a campamentos, etc. donde hay muchos de mis amigos, siempre me ha gustado tener muchos amigos y un día como estaba buscando por youtube para control remoto de coches, y cómo se hacían, me di cuenta que podía hacer uno para mi de los componentes que tenía,
Por favor vote por esto en el concurso de Micro-controlador---> >> (Gracias por adelantado)
Aquí
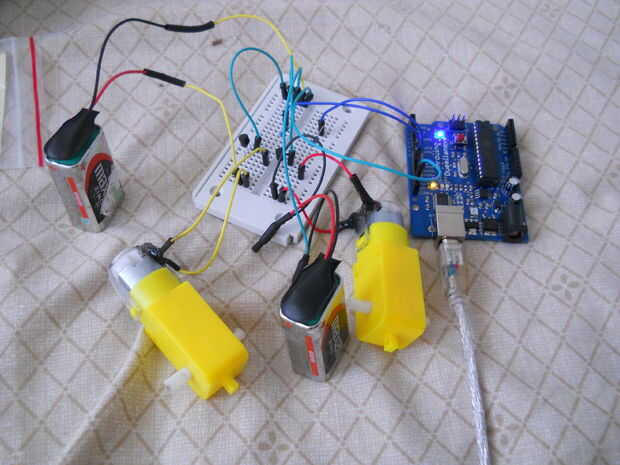
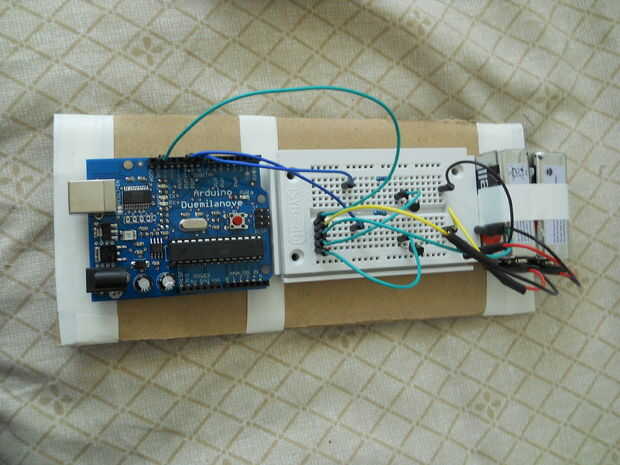
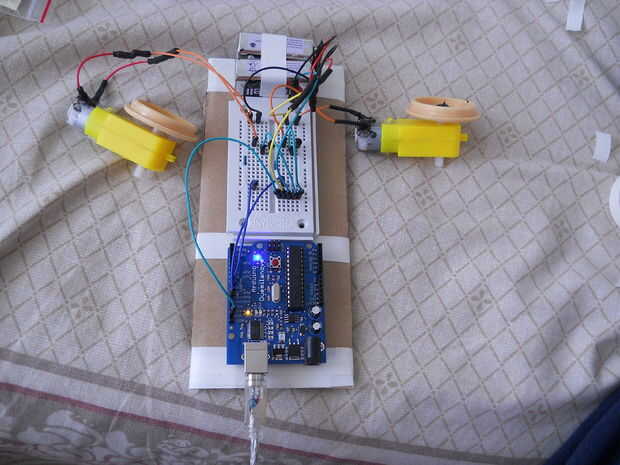
Todo lo que necesitaba para esta era:
- Arduino(20$)
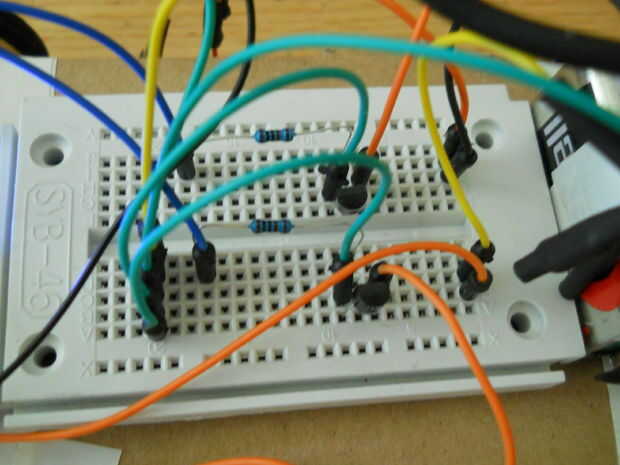
- Breadboard(3$)
- Algunos Capacitors(3$)
- Resistencias 1K,10K(2$)
- Motors(10$) 2
- 1 Servo(3$)
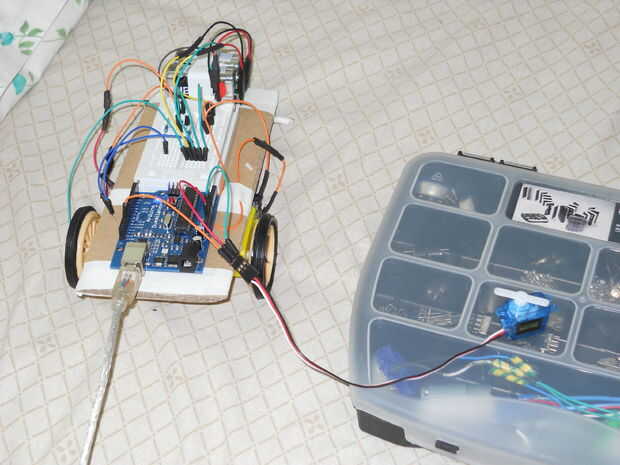
- 1 sensor de distancia (Optional)(10$)
- 1 sensor de sonido (Optional)(5$)
- 1 línea tracking sensor (Optional)(6$)
- LEDs(1$)
- Puente Cables(2$)
- Reguladores de voltaje (1 para el servo)(2$)
- Transistores ((NPN) para el Motors)(2$)
- 4 piezas 9 V batteries(8$)
- Transceiver(13$) blue-tooth
Por lo que es el costo total para la versión de principiantes: 69$ con el arduino
Y el costo para la versión pro es (como he hecho con todo el material opcional) total: 90$ con el arduino
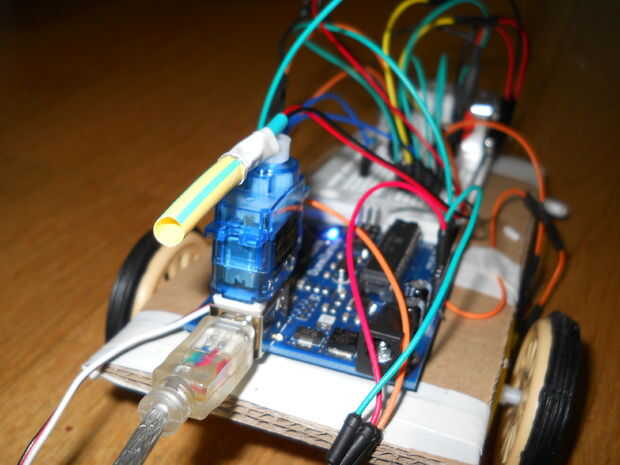
Aquí hay un video de todo el proyecto, este es el video de la modalidad 1 del proyecto, muestra el robot comunicarse con la computadora vía cable USB y sin cables y demuestra cómo funciona el tirador.
En el código que le proporcionará será sólo el código básico, que es sin las partes opcionales, si quieres el código para cualquiera de las otras partes, me solicita en la sección de comentarios y Iwill te doy el codigo de la parte especial,
En mi versión final, donde el código es muy largo, hay 4 modos de
modo 1 º
El robot se conecta a la computadora sin cables vía blue-tooth, y escucha a todos los comandos, incluyendo
(Gire a la izquierda, gire a la derecha, adelante, blanco gire a la izquierda, blanco gire a la derecha, dispara y más...)
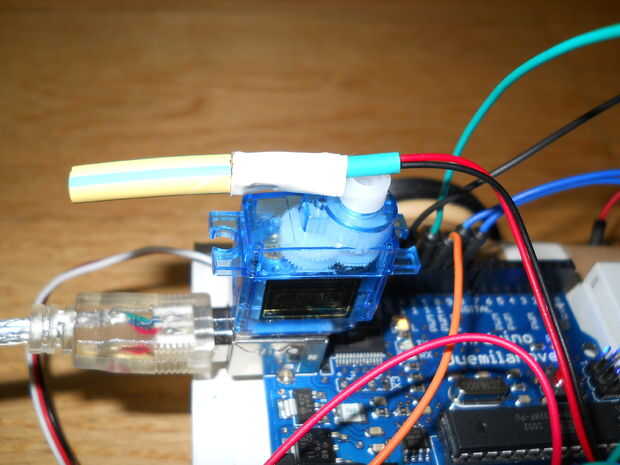
El objetivo es básicamente, que hay un servo con un LED montado en él, que actúa como una torreta como se puede ver en mis otros instructable (Star Wars X-Wing 2)
2 º modo
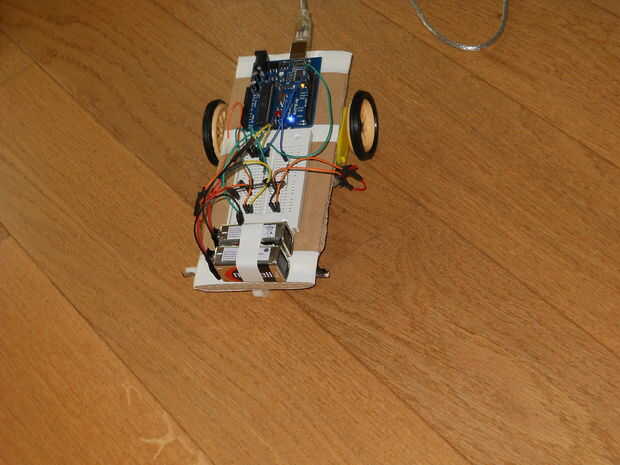
Este es el modo donde utilizar un sensor de distancia
El sensor de distancia constantemente se dan en valores de hasta qué punto están las cosas en el frente, y si algo es, entonces el robot se detener y dar vuelta lejos o ir atrás.
Que te gustaría montar el sensor de distancia en la parte superior un servo, ya le daría una gama mucho más amplia.
modo 3
Esto es donde el sensor de sonido actúa, cuando cualquier sonido sobre un cierto nivel se detecta como especificado en el código, o si una melodía almacenada es manada, entonces el robot se moverá por consiguiente para alejarse del sonido tanto como sea posible, es realmente fácil de revertir esto para que el robot viene hacia usted.
4 de modo
Este es el modo de seguimiento de línea, donde el robot sigue líneas, utilicé un sensor hecho de antemano, pero usted puede encontrar instrucciones sobre cómo hacer su propio, si buscas por Google. En este modo hay otro modos mini 2, uno es seguir una línea, y el otro es permanecer dentro de una línea.
Un buen consejo es asegurarse de que el sensor esté colocado como cerca del suelo posible.
Usted debe estar preguntándose cómo cambié los modos, bien podría hacerlo mediante el uso de la computadora, pero usé un interruptor de 5 para los cuatro modos y uno para fueray para el cuarto modo, para cambiar entre los modos mini, sólo utilicé un interruptor normal.
Pero después de todo esto me di cuenta era muy desordenado y sería mucho más fácil y mejor, si cambiaste el modo desde el ordenador, así hice más tarde.
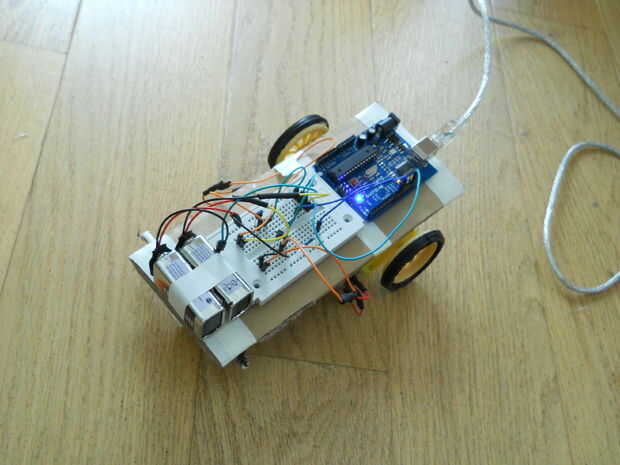
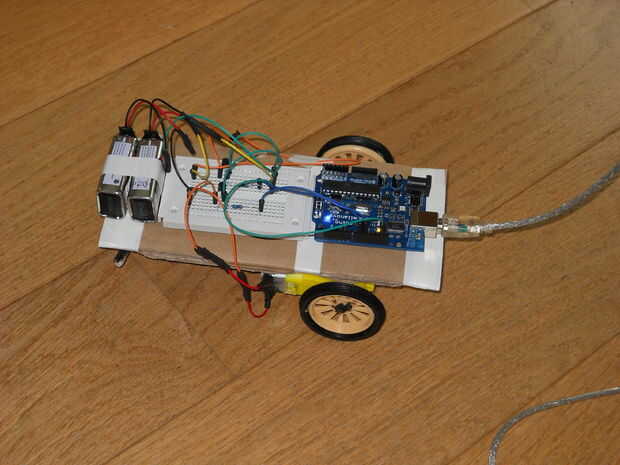
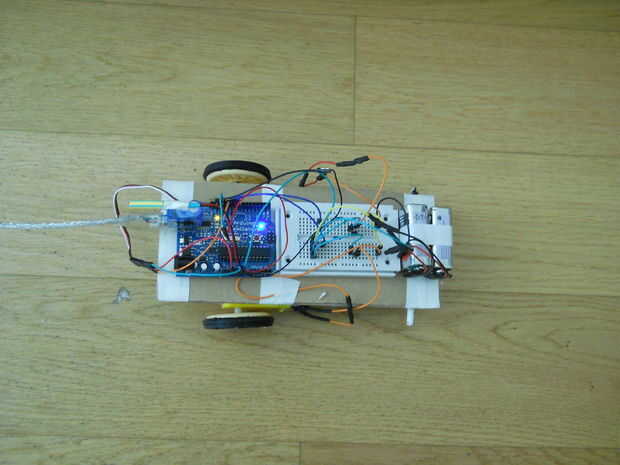
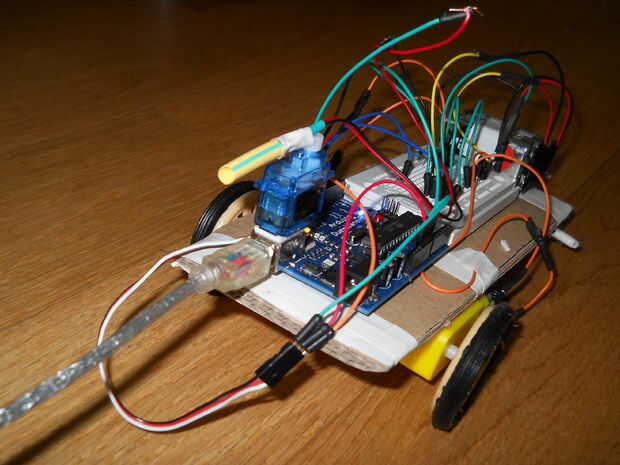
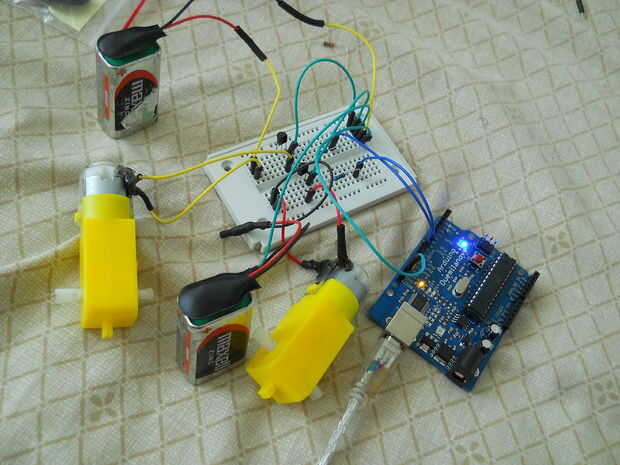
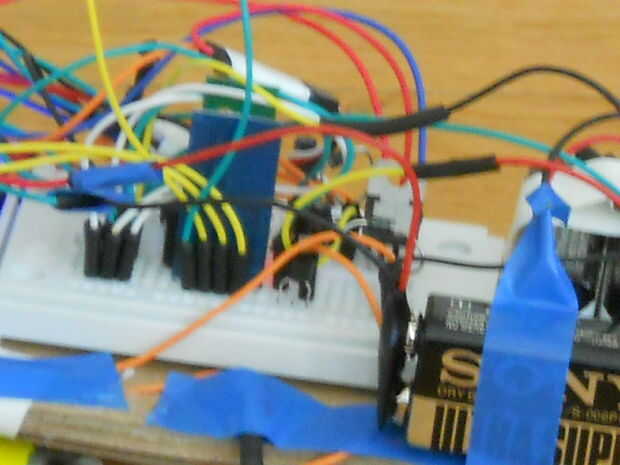
Hubo un gran uso de la energía como he utilizado 4 pilas de nueve voltios, como tuve que usar dos para los dos motores, uno para el servo y uno para el arduino, el servo es necesario mucho más corriente que puede proporcionar el arduino, así que tuve que utilizar otro dispositivo de poder y añadir un regulador de voltaje, ya que el servo puede manejar solamente 5V y pensé que añadiendo un montón de 1.5V baterías aumenta el peso mucho, tan solo usé mi batería de trusty 9 V y el regulador de tensión.
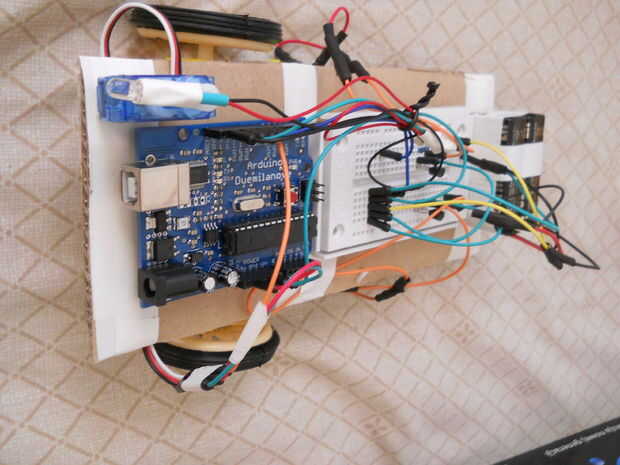
Los motores tuvieron que ser alimentado por un suministro eléctrico separado porque, si conectado los motores para arduino, no habría suficiente energía para conectar los 3 sensores y el transceptor de diente azul, y los motores no iría rápido si los conectado a arduino, así que utiliza un transistor para cada motor y había conectado al arduino.
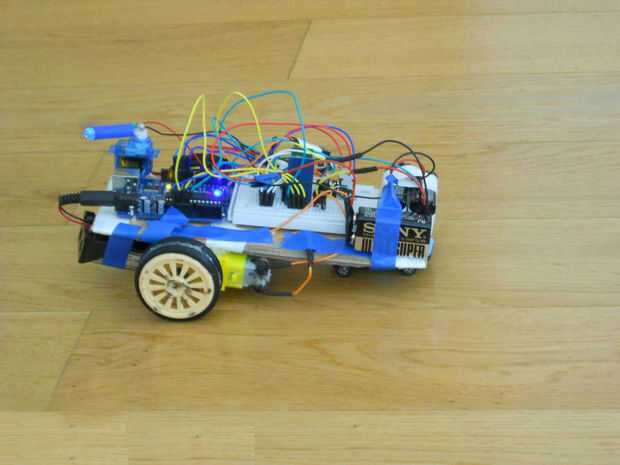
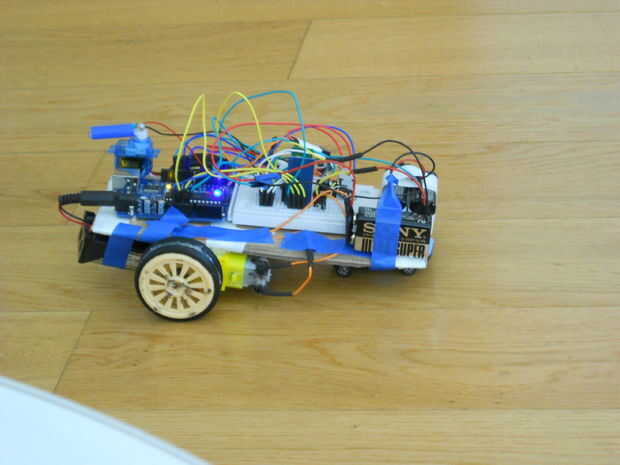
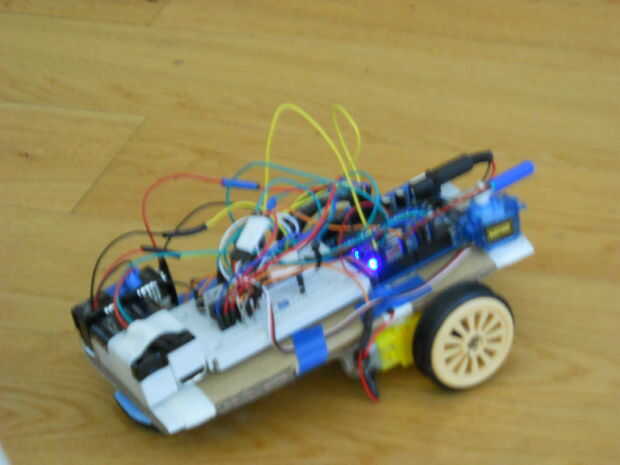
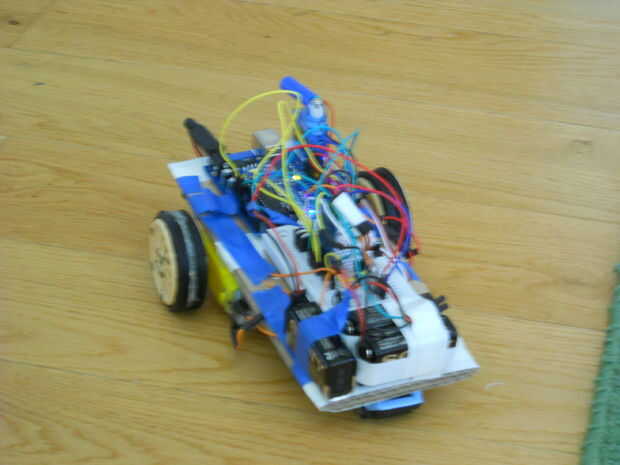
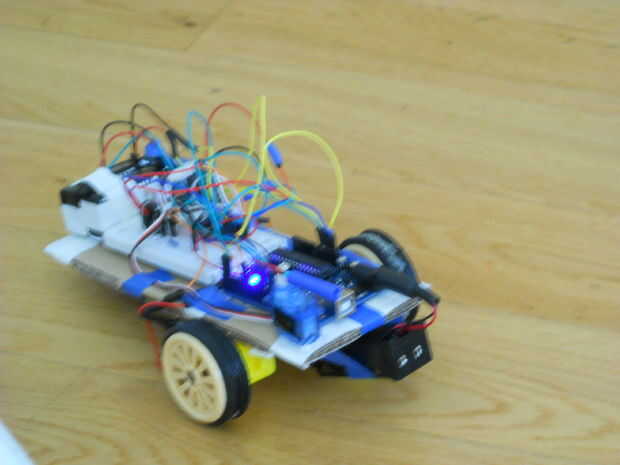
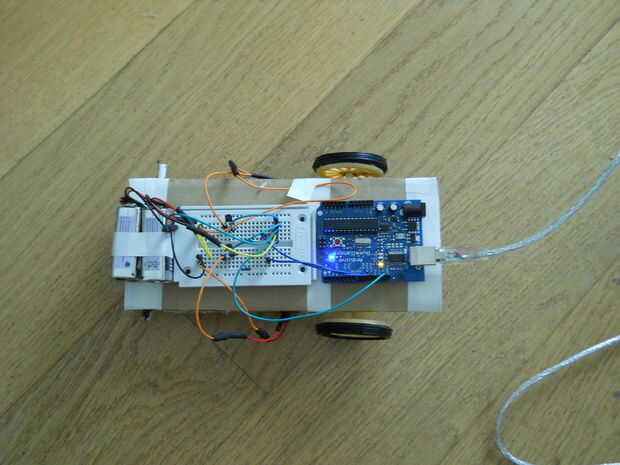
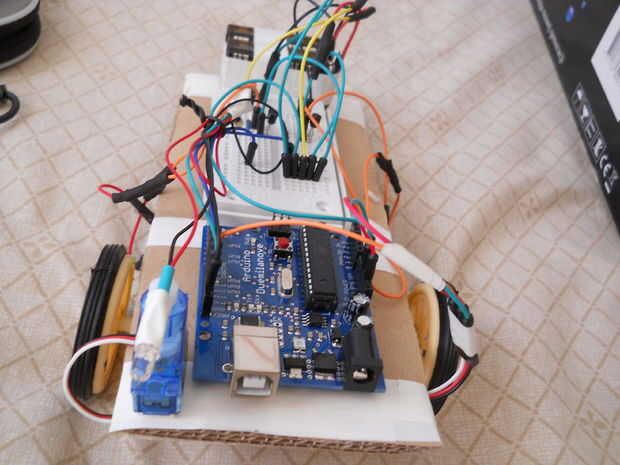
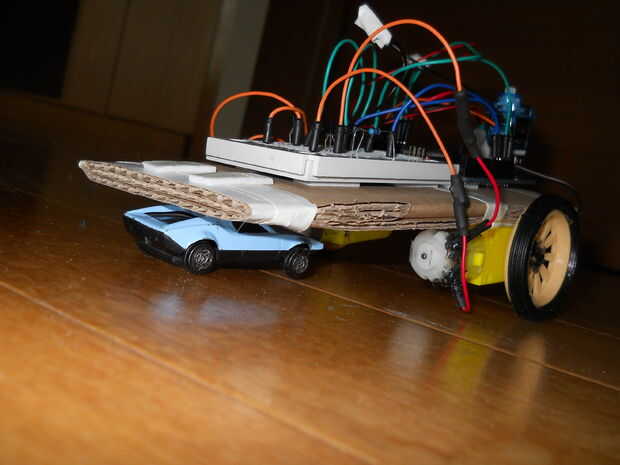
Y entonces el último paso para mí fue hacer una base para esto para que se vea fresco, por lo que hice una especie de cúpula de lo que hay que cubrir el robot entero y se ve genial, puede hacer cualquier tipo de domo que te gusta.
T aquí es el código principal para este robo, pero si quieres el código para las partes opcionales y pregunte en la sección de comentarios:
Servo.h #include
int LedPin1 = 12;
int LedPin = 13;
int MotorPin1 = 9;
int MotorPin2 = 10;
int servoPin = 6;
Servo VishalServo;
void setup()
{
digitalWrite (LedPin, alto);
Serial.Begin(9600);
Serial.println (tanque robótico);
pinMode (LedPin, salida);
pinMode (LedPin1, salida);
pinMode (MotorPin1, salida);
pinMode (MotorPin2, salida);
VishalServo.attach(servoPin);
VishalServo.writeMicroseconds(1500);
Serial.println (espere 1 segundo);
Delay(1000);
Serial.println (ahora puede dar comandos);
}
void loop()
{
mientras que (Serial.available() == 0);
int val = Serial.read() - '0';
int i = VishalServo.read();
Si (val == 2)
{
Serial.println (Robot está en);
digitalWrite (MotorPin1, alto);
digitalWrite (MotorPin2, alto);
Delay (500);
digitalWrite (MotorPin1, LOW);
digitalWrite (MotorPin2, LOW);
Delay(5);
}
Si (val == 1)
{
Serial.println (Robot está girando a la izquierda);
digitalWrite (MotorPin2, alto);
Delay(500);
digitalWrite (MotorPin2, LOW);
Delay(5);
}
Si (val == 3)
{
Serial.println (Robot es girar a la derecho);
digitalWrite (MotorPin1, alto);
Delay(500);
digitalWrite (MotorPin1, LOW);
Delay(5);
}
Si (val == 9)
{
Serial.println (girar a la derecha);
VishalServo.write(i+5);
Delay(5);
}
Si (val == 7)
{
Serial.println (girando a la izquierda);
Si (i = 165)
{
Delay(5);
}
if(i = 165)
{
VishalServo.write(i-5);
Delay(5);
}
}
Si (val == 5)
{
Serial.println(Shoot);
digitalWrite (LedPin1, alto);
Delay(50);
digitalWrite (LedPin1, LOW);
Delay(5);
}
Si (val == 8)
{
Serial.println(centering);
VishalServo.writeMicroseconds(1500);
Delay(5);
}
otra cosa
{
Delay(5);
}
}
Este es el código para el método de primera porque considero esto como la parte fundamental / principal de este robot.
Si desea que la llevaron a alojarte ya sólo cambiar el retardo entre pin 1 LED alta y LED pin 1 bajo. (O sólo podría preguntarme si crees que es demasiado difícil o si usted es un principiante.
Y asegúrese de que el servo se conecta a un pin PWM habilitado, he usado el pin 6 (PWM significa modulación de anchura de pulso)
Aquí está el código que deberá utilizar en el proceso (su un programa que los programas de la computadora) (se puede descargar gratis de internet, tipo justo en el procesamiento y el primer link es el)este código se utiliza para enviar actualizaciones a twitter diciendo lo que tu robot está haciendo cuando usted da los comandos:
/*************
* basado en: http://processing.org/reference/libraries/serial/serialEvent_.html
*************/
Import processing.serial.*;
Serie myPort; El puerto serie
PFont myFont; La fuente de pantalla
InString cadena; Cadena de entrada de puerto serie
int lf = 10; Salto de línea ASCII
Twitter twitter; Twitter
Va a conseguir oAuth trabajando en vez de esto, pero este se hace por ahora
String username = "Su-TWITTER-nombre de usuario"; nombre de usuario de Twitter aquí
Contraseña de la cadena = "TWITTER-su-contraseña"; tu contraseña de Twitter aquí
void setup() {}
Size(400,200);
Twitter = nuevo Twitter(username,password);
myFont = loadFont("AppleGothic-48.vlw");
textFont (myFont, 18);
println(serial.List());
myPort = serie nueva (este, Serial.list() [0], 9600);
myPort.bufferUntil(lf); WIAt para la línea de alimentación para final de buffer serial de especificar
}
void draw() {}
Background(100);
texto ("color seleccionado:" + inString, 10,50);
}
void serialEvent(Serial p) {}
inString = p.readString (); cadena serial //read
Por alguna razón que esto sólo quería trabajar en un try catch
tratar de
{
Status1 estado = twitter.updateStatus ("color favorito de Arduino es" + inString); //update twitter estado
}
catch (TwitterException e) {}
println(e.getStatusCode());
}
}
Cambio nombre de usuario y contraseña con tu usuario de twitter y contraseña, lo probé y funciona perfectamente.
Si usted desea publicar actualizaciones de una aplicación en twitter ir y echar un vistazo a mi instructable:
Este es el código para usar el telémetro ultrasónico en lugar de un sensor de distancia, como lo hice:)
int blinkLed = 13; Cuando el led parpadeará
int sensorPin = 0; Pin analógico en
int suma = 0; Variable para el cálculo de suma
int avgrange = 50; Cantidad de valores en un promedio de
int sensorValue; Valor promedio de te
int i, medios de comunicación, d; Variables
cm del flotador, pulgadas; Convertir a cm
void setup()
{
Serial.Begin(9600); Para comprobar lo que se lee en el puerto Serial
}
void loop() {}
d=analogRead(sensorPin); Leer el valor analógico
digitalWrite(blinkLed,HIGH); Enciende LED
Delay(d); Cambios de retardo con el analogread
digitalWrite(13,LOW); Apagar LED
Delay(d); Otro retraso
cm = (d / 2) * 2,4; Convertir el valor en centímetros
pulgadas = d/2; Valor en pulgadas
Serial.println(cm); Imprimir el promedio de todos los valores medidos
Este es el código si desea hacer un promedio de los valores de lectura
/*
para (i = 0; i < avgrange; i ++) {}
suma += analogRead(sensorPin);
Delay(10);
}
media = suma/avgrange;
Serial.println(media); Imprimir el promedio de todos los valores medidos
suma = 0;
media = 0;
*/
}
Si quieres el esquema para este proyecto, o si desea código específico para diferentes cosas o si necesita ayuda relacionada con este proyecto, entonces simplemente deja un Comentario en la sección de comentarios, o si desea obtener más información sobre cómo conectarse a cualquiera de los abajo, por favor pregunte.
Y si quieres que esto se ejecute con comandos del control remoto, todo lo que necesitas hacer es utilizar este control remoto Infra rojo y usted puede controlar el robot todo inalámbricamente con un mando a distancia, o si desea ser más como un coche de control remoto, a continuación, puede Agregar un controlador de control remoto real de coche o cualquier plataforma de juego para pc, links a continuación...
Distancia por infrarrojos :
http://CGI.eBay.com/Arduino-ir-remote-control-0038B-Module-DIY-kit-/280645829263?PT=LH_DefaultDomain_0&hash=item4157cb828f
Control remoto RC:
http://www.Amazon.com/DP/B0000AW9RE/Ref=asc_df_B0000AW9RE1583100?Smid=A3O0M985ZCU7ZK&tag=PgMP-440-95-20&linkCode=ASN&Creative=395105&creativeASIN=B0000AW9RE
Hice mi propia cúpula para este proyecto que cabe encima de todos el lío y hace que el coche de RC parece un coche del RC, pero no añadir ninguna imagen de la cúpula como quisiera gente para hacer sus propias cúpulas personalizadasy no sólo me copia...
Y por supuesto ampliar este proyecto y si haces algo cool compartir una foto de él añadir una foto y publicar un comentario, como me gustaría ver cómo este instructable te ha inspirado la gente para llegar a algo grande.
Enlaces:
Donde descargar el IDE de Arduino : http://arduino.cc/en/Main/Software
Donde descargar proceso : http://processing.org/download/
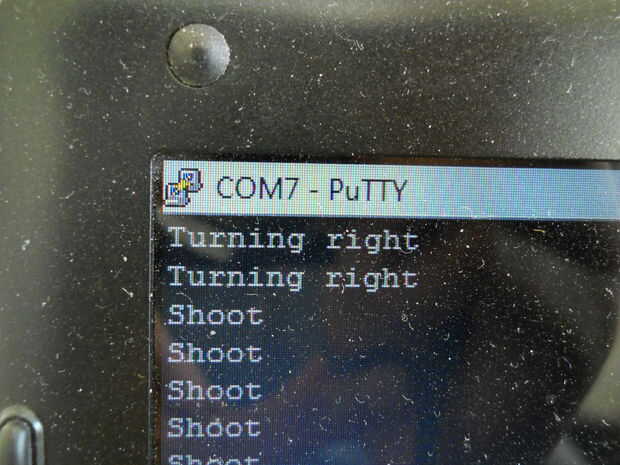
Realmente no como la interfaz de Arduino como tenía que hacer clic en entrar después de ingresar cada comando, usé masilla
Donde descargar Putty : http://www.chiark.greenend.org.uk/~sgtatham/putty/download.html
Perdón por algunas imágenes borrosas... :(
 Daemon")






")


")

")
