Paso 1: ¿Qué es ROS?
![]()
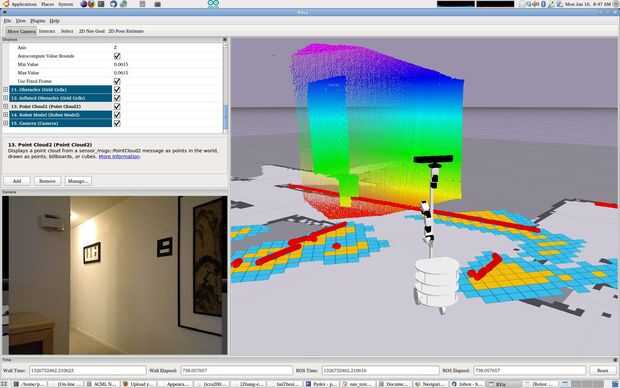
Para aquellos no familiarizados con ROS. Es un sistema operativo robótico de código abierto que ofrece servicios estándar del sistema operativo de abstracción de hardware, control de dispositivos de bajo nivel, implementación de las funciones habituales, paso de mensajes entre procesos y gestión de paquetes. Se basa en una arquitectura gráfica que proceso ocurre en los nodos que pueden recibir, publicar y multiplexar sensor, control, estado, planificación, actuador y otros mensajes. En términos del laico conecta hardware con el software para un entorno de programación avanzado para controlar el hardware de bajo nivel. Sin dejar de mencionar también tiene herramientas poderosas para correr cosas de simulación junto con visualizaciones 3d.
")












")