Paso 9: El software

El software construido puede encontrarse en aquí: https://github.com/equilerex/PiLapseRails
Ve también incrusta un vídeo del software en acción, pero la captura de pantalla es realmente fuera de sincronización y perezoso (software de mierda pero no pudo rehacer: P)
en esta página encontrará todos los pasos que debes pasar para llegar corriendo en su frambuesa junto con más información sobre cómo trabaja o puede ser utilizado, etc..
- en general, hay algunos dignos de características:
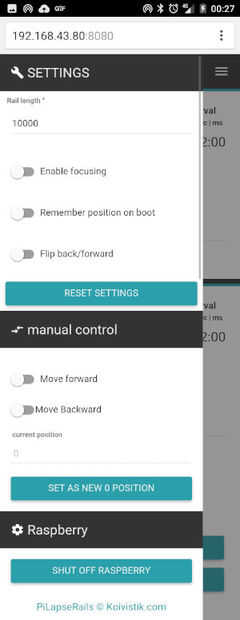
- Recuerda la configuración entre sesiones (después de reiniciar)
- Configurar la longitud del carril (limitará el movimiento por consiguiente)
- Estimación de tiempo/tomas/inteval y regeneración (según la longitud del carril)
- configurar un lapso mediante el establecimiento de la dirección, la longitud del motor y "esperar" longitud
- modo del bulbo que permite definir el disparo de obturador speedtest (cuando youre bombilla modo de prueba)
- bucle (se mantenga por caer hacia atrás y de cuarto en el carril)
- controles de motor manual (movimiento posterior / cuarto) tapa motor pinsetc
tengo en cuenta que el "recuerdo" de la posición funciona mejor en sistemas fijos y fiables donde la correa es
no saltarse los engranajes, no estable, el revestimiento es de motor, etc..
Gracias por leerme y espero que pueda inspirar a algunos de que construyas tu propio ;)
Si está interesado, puede verse el artículo que escribí en la página del proyecto dedicado aquí: http://blog.koivistik.com/pilapserails-raspberrypi-time-lapse-rails/