Paso 3: Construir el circuito
![]()
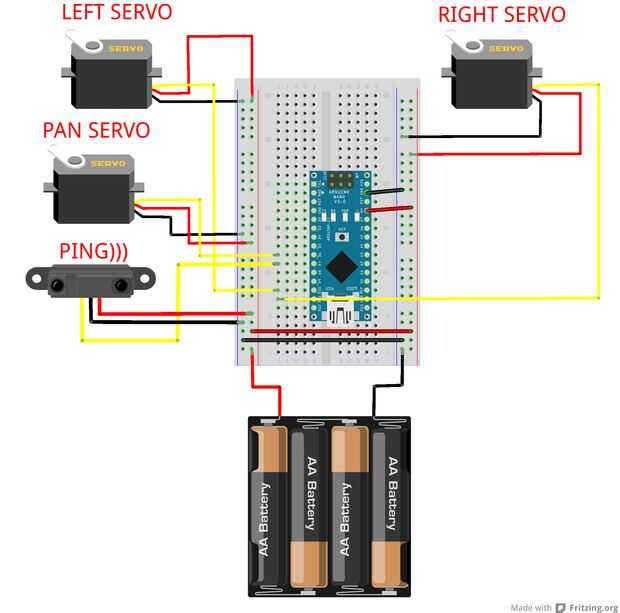
Como se puede ver, el circuito es muy sencillo otra vez. Nada ha cambiado desde el primer robot parte de añadir un tercer barrido servo al pin D6 de Arduino. He intentado hacer el esquema tan limpio como sea posible y creo que es bastante fácil de seguir. Si el robot no está funcionando correctamente, el único problema/s que preveo están en algún lugar dentro del código. No dude en pedir ayuda. Como se señala en mi obstáculo anterior evitando robot instructable,
el sensor que se ve en el esquema no es el PING))) sensor. El software que usé para crear el esquema no tiene PING))) sensor en su inventario, usé uno que algo por lo menos, se asemejó a PING))) sensor. Las conexiones son las mismas (rojo = energía, negro = tierra, amarillo = SIG). Creo que es todo lo que tiene que decir sobre el circuito, pero si usted tiene cualesquiera preguntas, no dude en preguntar. Continuar en el paso siguiente para la parte de programación.




")







 Cómo hacer un OAWR (obstáculo evitando caminar Robot)")
