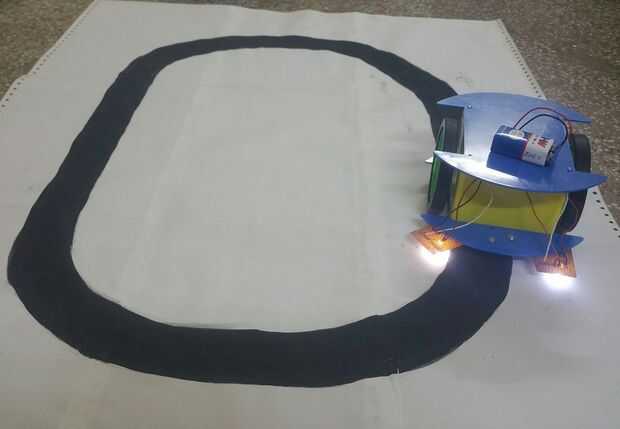
Se trata de un bot elemental que sigue un camino negro sobre un fondo más claro. El robot detecta cambio en la dirección por detección de cambio de color a través de los dos sensores LDR.
DE TRABAJO:
Hay dos LEDs que brillan la luz en la superficie de la pista. Normalmente, la luz cae sobre la superficie blanca y refleja detrás. La luz reflejada es atrapada por las LDRs.
Estos LDRs se unen al motor de la rueda y las ruedas giran cuando la luz incide sobre la LDR (resistencia de una resistor dependiente es inversamente proporcional a la energía de la luz que incide sobre ella la luz).
Cuando se encuentra una vuelta (decir izquierda vuelta), el LDR izquierda dejaría de recibir la luz reflejada como la mayoría de la luz de LED sería absorbida por el color negro. Por lo tanto, el motor izquierdo deja de funcionar y la rueda izquierda detenga, mientras que la rueda derecha no cesa de agitarse delante. Por lo tanto, en total el robot gira a la izquierda.







")





")