Paso 1: Diagrama de
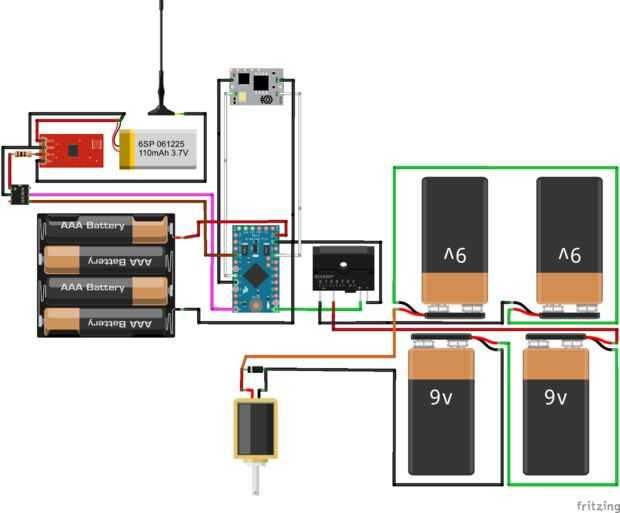
Fritzing no tiene todos los componentes, por lo que existen algunas sustituciones con cableado equivalente:
- Las pilas de 9V son las baterías de SLA 12V.
- Las antenas representa el mango del martillo.
- La memoria representa el escáner de huellas dactilares.
- El solenoide representa el electroimán.
- El rele de estado solido en la foto es para corriente alterna en lugar de DC.
- El arranque del Op-Amp representa el Sensor capacitivo.
- En realidad es un cable que conecta la tierra del Sensor capacitivo para el núcleo del electroimán. Esto proporciona un camino a la tierra literal cuando el martillo está situado en la planta física.
Hay un montón de mejoras que pueden hacerse! Como accidentalmente no tierra del mango como yo lo hice, puede nix fuente de alimentación del sensor capacitivo y el optoacoplador. Incluso puede simplemente utilizar la Arduino capsense biblioteca y no en conjunto sensor capacitivo, pero puede ser meticuloso. En esa nota, si todo te importa es controlar el martillo, puede deshacerse completamente del escáner de huellas dactilares y el Arduino y acaba de obtener una unidad de control remoto, como este. Todo lo que tendría que hacer es conectar la salida del receptor a la entrada de rele de estado solido, y boom, remota controlada Mjolnir. Ninguna programación requerida!
EDIT: olvidé incluir interruptores! Tendrás algunos interruptores deslizantes simple para encender y apagar el Arduino y el sensor capacitivo.




")








")