Paso 2: El chasis y las ruedas









La base de cada robot móvil es el chasis: lo que proporciona la fuerza motriz. Este robot de los motores y los variadores vienen del par de servos SG90. A modificar para rotación continua, reducir sus casos y les unen. Así como la lectura, consulte las notas sobre cada imagen.
Rotación continua:
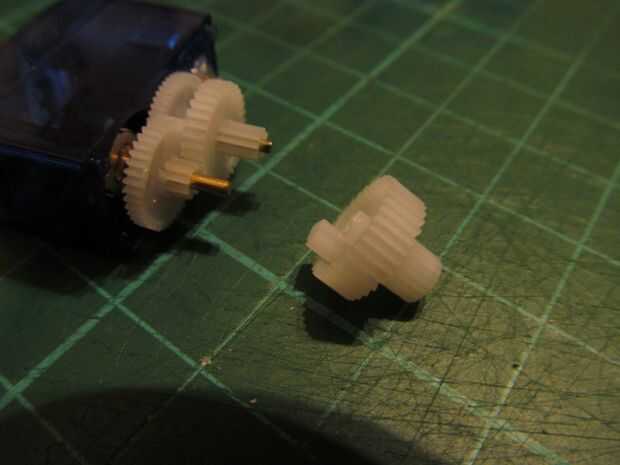
El servo por defecto solamente mover a través de arcos de 180 grados. Tenemos que girar continuamente en una dirección que establecimos. Esto está bastante bien documentado en línea: tira hacia fuera el potenciómetro, reemplazar con dos resistencias de igual valor. Mi servo de necesarias resistencias de 2,5 K. Sólo medir el potenciómetro antes de aceptar mi palabra para ella.
También tienes que cortar el eje del potenciómetro para que no agarre el eje de salida y saque una pequeña lengüeta de plástico que detiene todos los 360 grados de rotación.
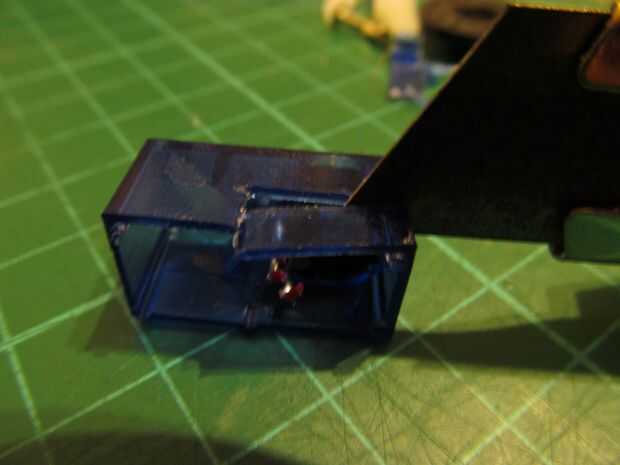
Caso de modificación:
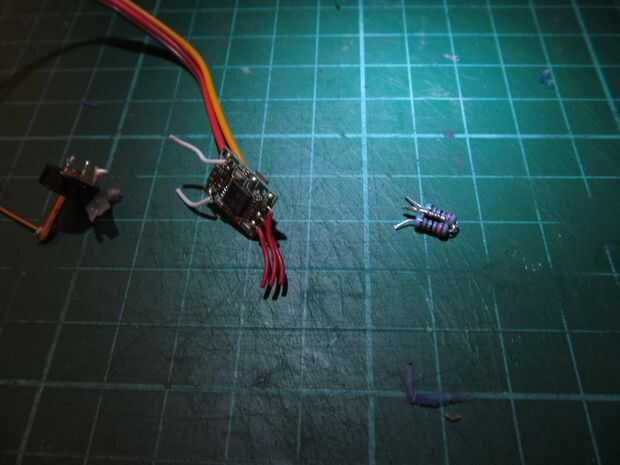
Normalmente un SG90 es aproximadamente de 3cm de altura. Necesitamos dos de ellos espalda con espalda en espacio de 5cm. Sin el potenciómetro cada servo se puede cortar en una forma de "L", y entonces puede intersectar. Cuando esto se hace solamente tomar 4,5 mm. Los tableros de control tuvieron que ser reubicadas. Las imágenes de cheques.
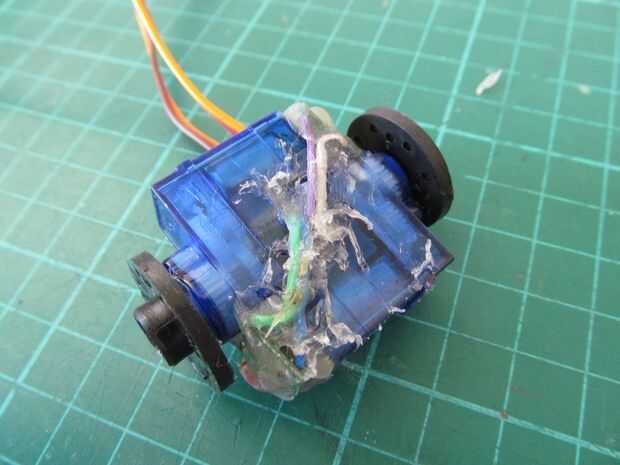
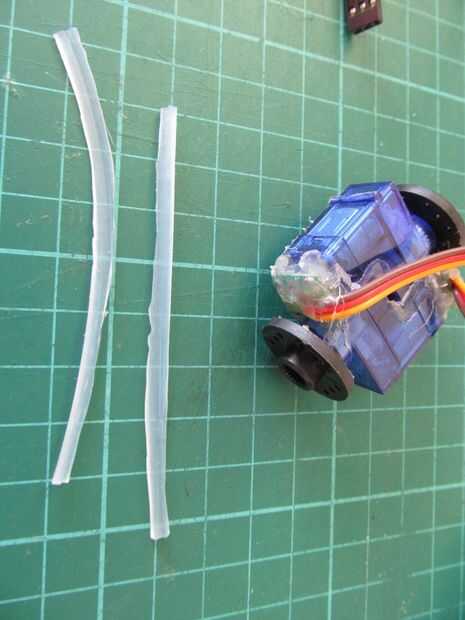
Algunos patines de alambre plegado se pusieron en frente y volver a parar el robot bamboleo excesivamente.
Ruedas:
Las ruedas que utilicé fueron cuernos servo de algunos MG996R (un servo de tamaño estándar) utiliza para otra cosa. Son 2cm de diámetro, y les montara tiras hacia fuera, por lo que actúa como un embrague y proteger los engranajes de los servos.
Para mejorar la tracción, se colocó una gota del pegamento caliente alrededor como un neumático. Esto fue alisado hacia fuera con un pedazo de tubo de silicona. Cuando el pegamento se haya enfriado, simplemente puede ser pelado. Luego suavizado final se realizó con un soldador para quemar cualquier alta patchs.











")
