Paso 8: el circuito de la soldadura
![]()
![]()
![]()
Prestar especial atención a la polaridad de los LEDs (pata más larga es positivo) y conector de alimentación (pin del centro es positivo). Omitir el 2 LEDs blancos y 100Ω resistencias si usted no está haciendo un caso transparente. Enchufe el escudo terminado en la parte superior de la Arduino, alinear los 8 pines con pines digitales 0-7. Conecte el servo en el cabezal de 3 pines en el escudo, teniendo cuidado de observar la polaridad (ya conectar el servo en hacia atrás puede dañar). Conectar el Arduino al ordenador con un cable USB. Descargar el archivo de código y lo subo a la Arduino.After usted sube el bosquejo (o aplica energía por primera vez) todos los LEDs se iluminarán, y el servo debe girar la rueda dispensadora para su ubicación inicial. Cuando las luces se apagan, está listo para un golpe. Gire el potenciómetro de sensibilidad hacia abajo hasta que el LED verde deja de parpadear. Si la luz permanece encendida sin importar cuánto usted gire, revise el cableado del sensor piezoeléctrico para cortocircuitos o conexiones en mal estado. Para prueba, ajuste la olla para que la luz verde dejará de parpadear sin ninguna entrada, pero golpeando suavemente el knock sensor hace parpadear. Toque al ritmo de "Afeitado y un corte de pelo". El LED verde debe parpadear y debe girar el servo. Si usted incluye los LEDs blancos, debe parpadear #1 y #2 debe permanecer encendido durante unos segundos. Si se introduce un ritmo incorrecto, debe parpadear el LED rojo. Presione el botón de programación y LEDs rojo y verde deben encenderse. Toque un ritmo nuevo, suelte el botón y espere a un segundo. Las luces roja y verdes deben echo el ritmo visual, y aprovechar este nuevo ritmo debe girar el servo. Reiniciar o desconectar el Arduino volverá al valor por defecto de "afeitado y un corte de pelo
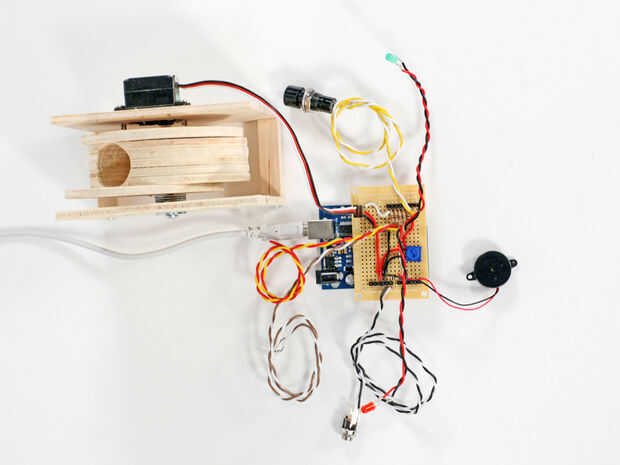















")