Paso 5: Esquemas
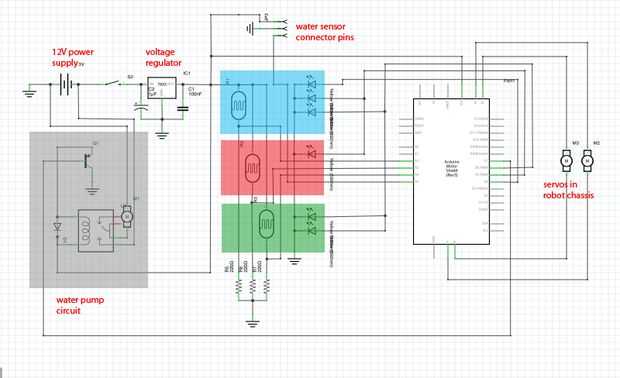
Arriba se muestra el diagrama del circuito principal para tu robot de batalla. Aunque la Junta de Galileo no se incluye en el diagrama, los pasadores de la misma se comparten entre el escudo del motor Galileo y Arduino. Todas las conexiones de pin son los siguientes:
Análogo
2 - resistencia óptica
3 - resistencia óptica
4 - resistencia óptica
5 - sensor agua
E/S digitales
2 - buzzer
3 - 5V (pwm motor A)
4 - 1 LED
5 - 3 LEDs
6 - 2 LEDs
8 - motor freno B
9 - motor freno A
11 - 5V (pwm motor B)
12 - dirección motor A
13 - dirección motor B
El escudo del motor Arduino asume cada motor necesita cuatro pernos para operar: dirección, velocidad, pausa y detección de la corriente. El chasis de dagu utiliza dos servos. No necesitamos controlar motor de corriente, y estamos manteniendo la velocidad del motor constantemente en max, significa que sólo tenemos que controlar dos pernos por motor.
Para obtener el bot para avanzar, el comando para el escudo del motor Arduino sería algo como:
Eso significa que alguien tendría que ejecutar cuatro comandos a su robot a avanzar en la ConnectAnything! UGH! Por el contrario, queremos convertir su celular en un control remoto con botones que puedes pulsar para seguir adelante, girar a la derecha, gire a la izquierda y detener. Podemos hacer esto con una combinación de cableado real en el tablero y cableado digital en ConnectAnything.
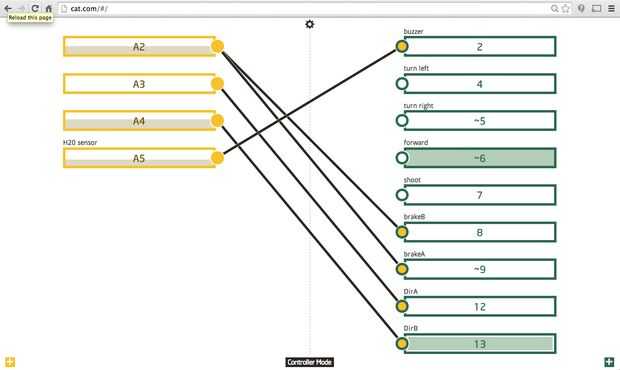
Arriba se muestra el ConnectAnything "circuito digital". En ConnectAnything, le deseamos:
A2 a los saltos
A3 para controlar la dirección de un motor
A4 para controlar la dirección del otro motor
Vamos a seguir rodando con el ejemplo de comando hacia adelante. Para avanzar, pulsar el botón de verde pin 6 en el modo de Control de ConnectAnything, como se muestra en la imagen incluida. Esto se enciende ningún LED físicamente conectado al pin 6 en el circuito de protoboard. Hay dos LEDs conectados al pin 6, uno delante de un fotodiodo conectado al A2 y otro frente a A4. Tira de A2 y A4 alta. Sin embargo, estableceremos los pines analógicos a la inversa, entonces A2 y A4 son bajos mientras que A3 es alta. Porque A2 se tira bajo, se desconectan las roturas. A4 se tira enfrente de A3, un motor avanza a toda velocidad y el otro mueve toda velocidad hacia atrás, avanzar el robot entero.
Notas adicionales:
- El Galileo requiere exactamente 5V para funcionar y las necesidades de al menos 2A si usando WiFi. Para cumplir con estas condiciones utilicé dos fuentes de alimentación, uno específicamente para el Galileo y otro para el resto del circuito.
- Los servos y bomba requieren más potencia que puede ofrecer solo Galileo, razón por la cual usé una batería externa de 12V. Cierta energía es enviada a través de un lm2596 (conmutación dc-dc buck convertidor) a rampa hasta 5V para alimentar los servos y conectar con el resto del circuito. Un conmutación paso conversor es más eficiente que un regulador de voltaje lineal. No pierde tanta energía al calor porque es cambiar constantemente.
- Pines PWM debe ser siempre alta, así que enlace ambos pasadores PWN a 5V. Este paso se describirá con más detalle más adelante.
explicación de qué diablos estos circuitos son:
desea simplemente pulse 1 botón para dar las órdenes de la Junta como "hacia adelante", ="" "stop", ="" "izquierda", ="" etc. = "" pero = "" nos = "" quieren = "" a = "" = "" este = "" en = "" connectanything. = ""













